

Adjustable 3,4,5-SPS type parallel mechanism experiment bench
An experimental platform, 5-SPS technology, applied in manipulators, large-scale fixed members, program-controlled manipulators, etc., can solve problems such as unfavorable motion characteristics of parallel mechanisms with multiple configurations, unadjustable kinematic pairs, and single motion characteristics.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
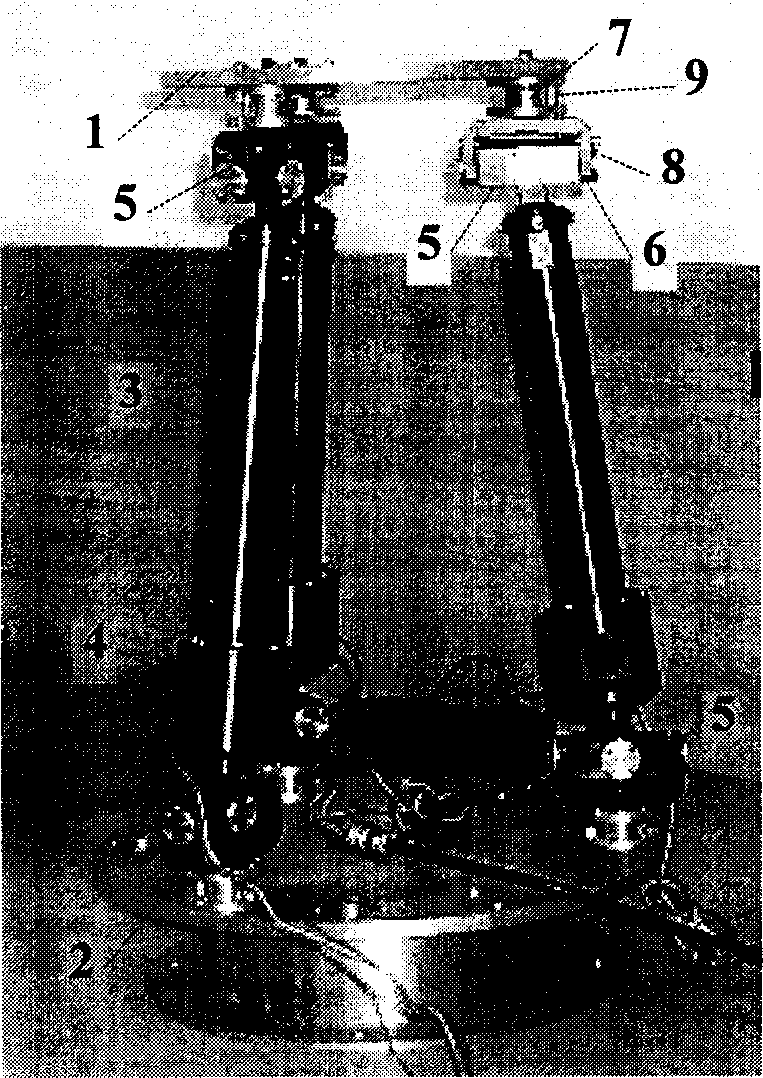
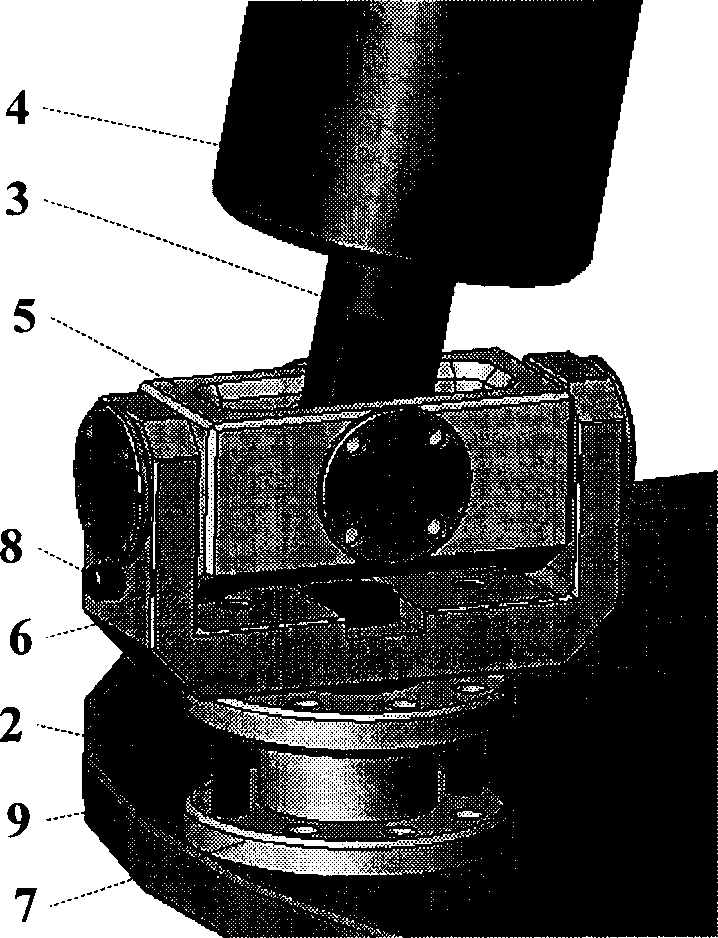
[0008] figure 1 It is the first embodiment disclosed by the present invention. The three SPS linear drive branch kinematic chains have the same structure, and are symmetrically distributed in an equilateral triangle on the upper platform 1 and the base 2. Each linear drive branch 3 has a ball pair at both ends, and a ball pair in the middle. A linear drive mechanism and a stepping motor 4, the axis of which coincides with the center of the ball pair, is driven by the stepping motor 4 to realize the telescopic movement of the linear drive branch 3. The ball pair is composed of three rotating pairs whose axes are orthogonal; the horizontal pin 8 and the vertical pin 9 are used to limit the rotation of the two rotating pairs in the ball pair, and the three ball pairs connected to the moving platform 1 are turned into rotating pairs to form a An experimental platform for a 3-SPR parallel mechanism with 3 degrees of freedom.
Embodiment 2
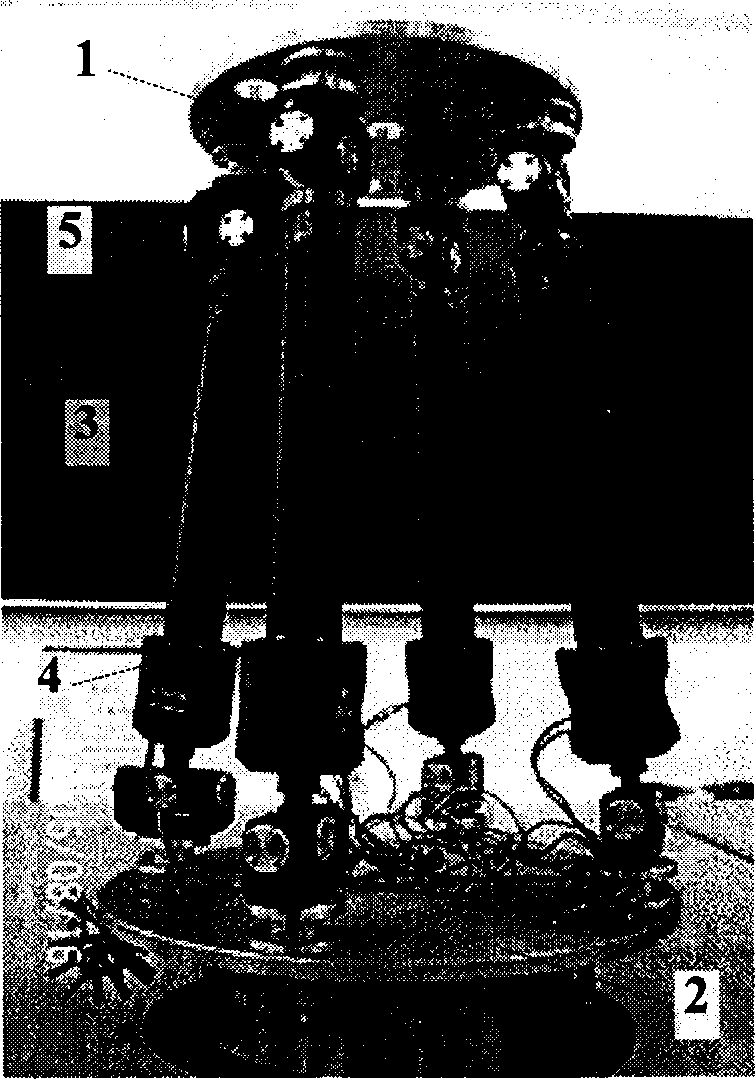
[0010] figure 2 It is the second embodiment disclosed by the present invention. The difference from the first embodiment is that there are 4 SPS type linear drive branches, which are distributed symmetrically in a regular quadrilateral on the upper platform 1 and the base 2; 9. Limit the rotation of the two rotating pairs in the ball pair, and turn the two adjacent ball pairs connected to the moving platform 1 into rotating pairs to form a 2-SPS / 2-SPR parallel mechanism experiment platform. The degree of freedom of the mechanism for 4.
[0011] The adjustable 3, 4, 5-SPS type parallel mechanism two experimental platforms, in addition to the characteristics of high rigidity and high load capacity of the parallel mechanism, also has the characteristics of relatively simple mechanism, symmetrical structure, high motion precision and good adjustability. They can be used in the experimental research of mechanism synthesis and motion analysis of various parallel mechanisms with fe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More