

Aspects of a control system of a minimally invasive surgical apparatus
a control system and surgical equipment technology, applied in the field of minimally invasive medical equipment, can solve the problems of minimal invasiveness, adoption of minimally invasive techniques, and saving millions of hospital days, and consequently millions of dollars annually in hospital residency costs alon
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
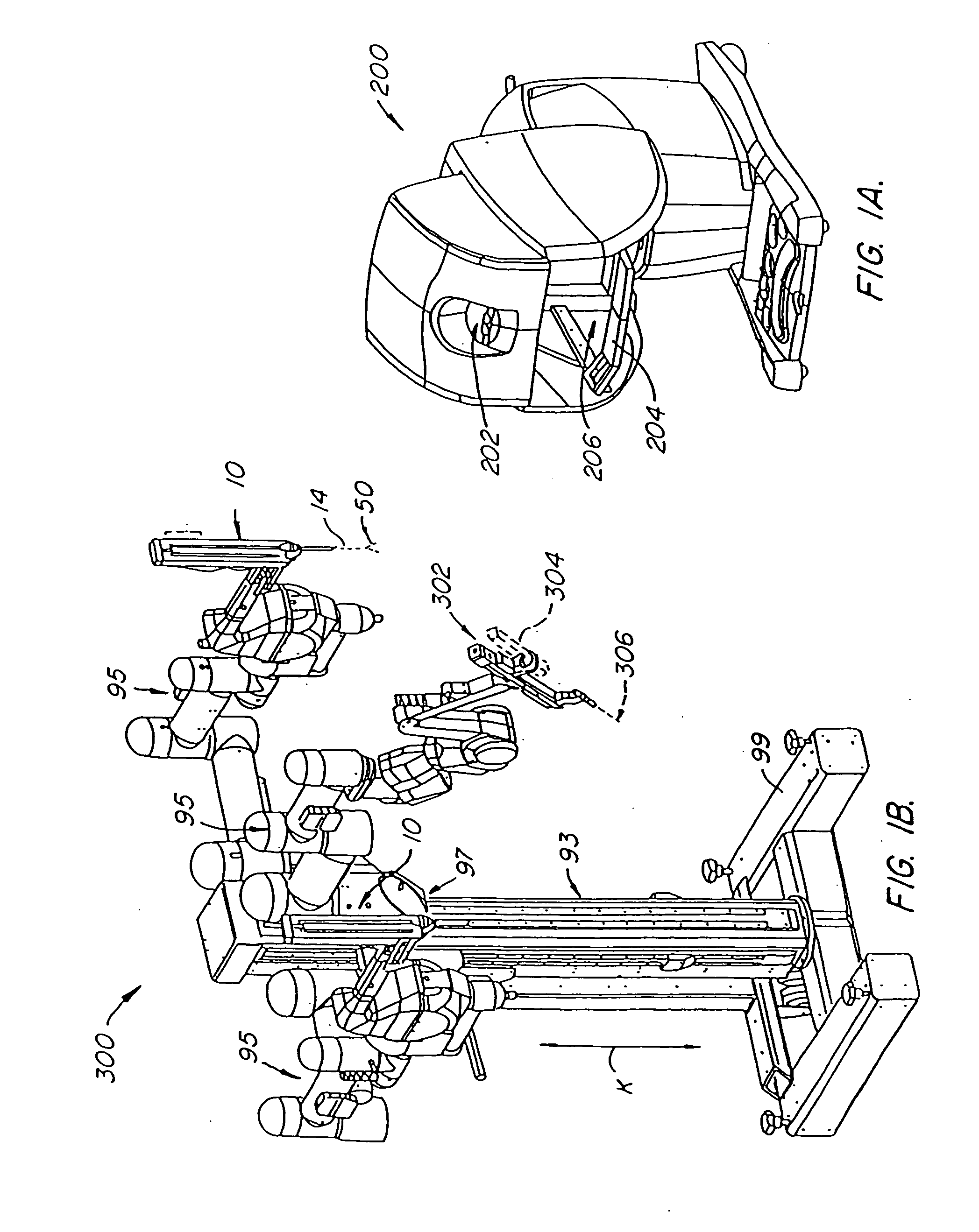
Referring to FIG. 1A of the drawings, an operator station or surgeon's console of a minimally invasive telesurgical system is generally indicated by reference numeral 200. The station 200 includes a viewer 202 where an image of a surgical site is displayed in use. A support 204 is provided on which an operator, typically a surgeon, can rest his or her forearms while gripping two master controls (not shown in FIG. 1A), one in each hand. The master controls are positioned in a space 206 inwardly beyond the support 204. When using the control station 200, the surgeon typically sits in a chair in front of the control station 200, positions his or her eyes in front of the viewer 202 and grips the master controls one in each hand while resting his or her forearms on the support 204.
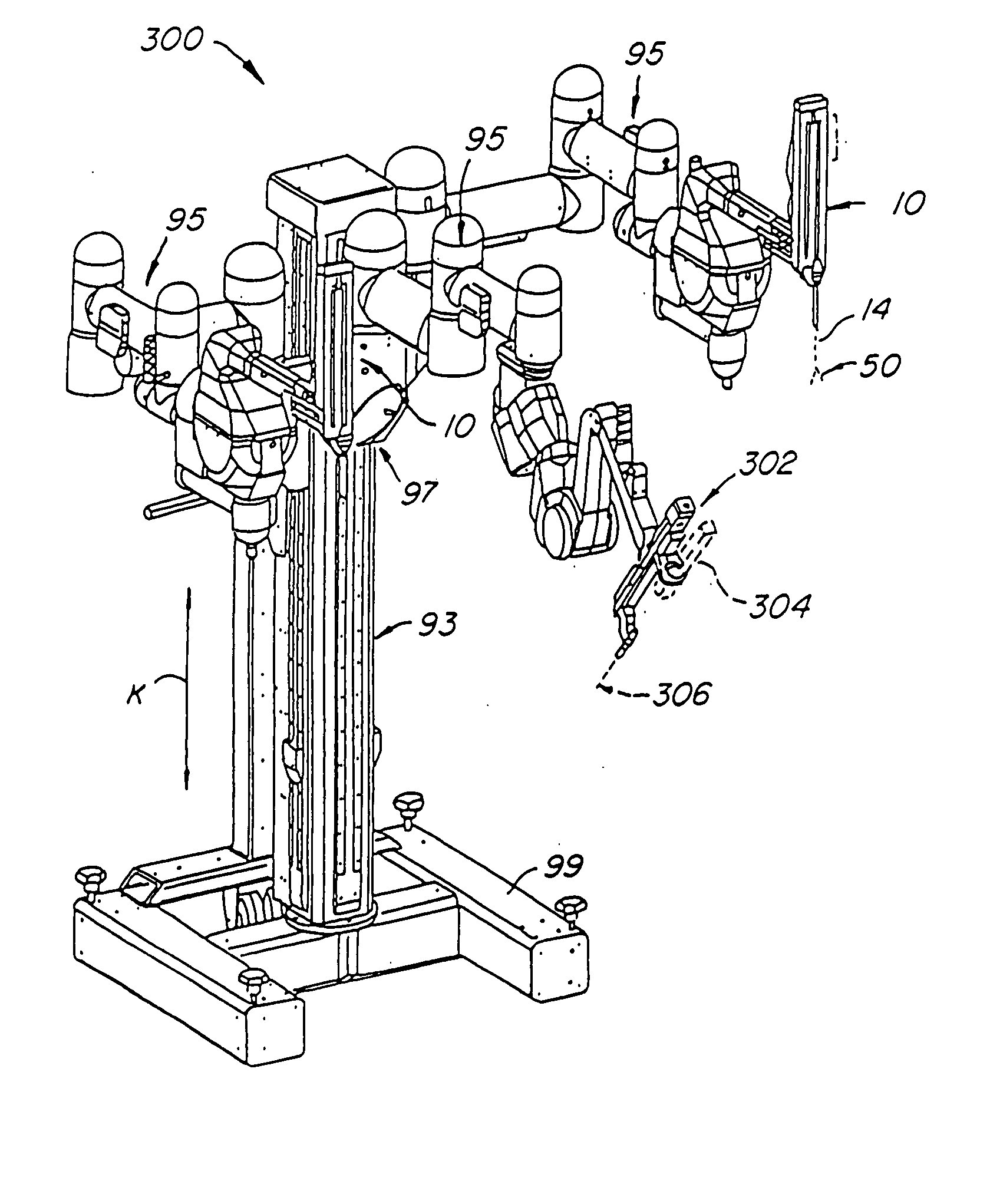
In FIG. 1B of the drawings, a cart or surgical station of the telesurgical system is generally indicated by reference numeral 300. In use, the cart 300 is positioned close to a patient requiring surgery and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More