

Adaptable servo-control system for force/position actuation
a servo control system and force/position technology, applied in the direction of resistive welding apparatus, welding electric supply, welding monitoring devices, etc., can solve the problems of complex welding system, requiring different replacement parts, and costing a tremendous amount of money and tim
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] I. System Overview
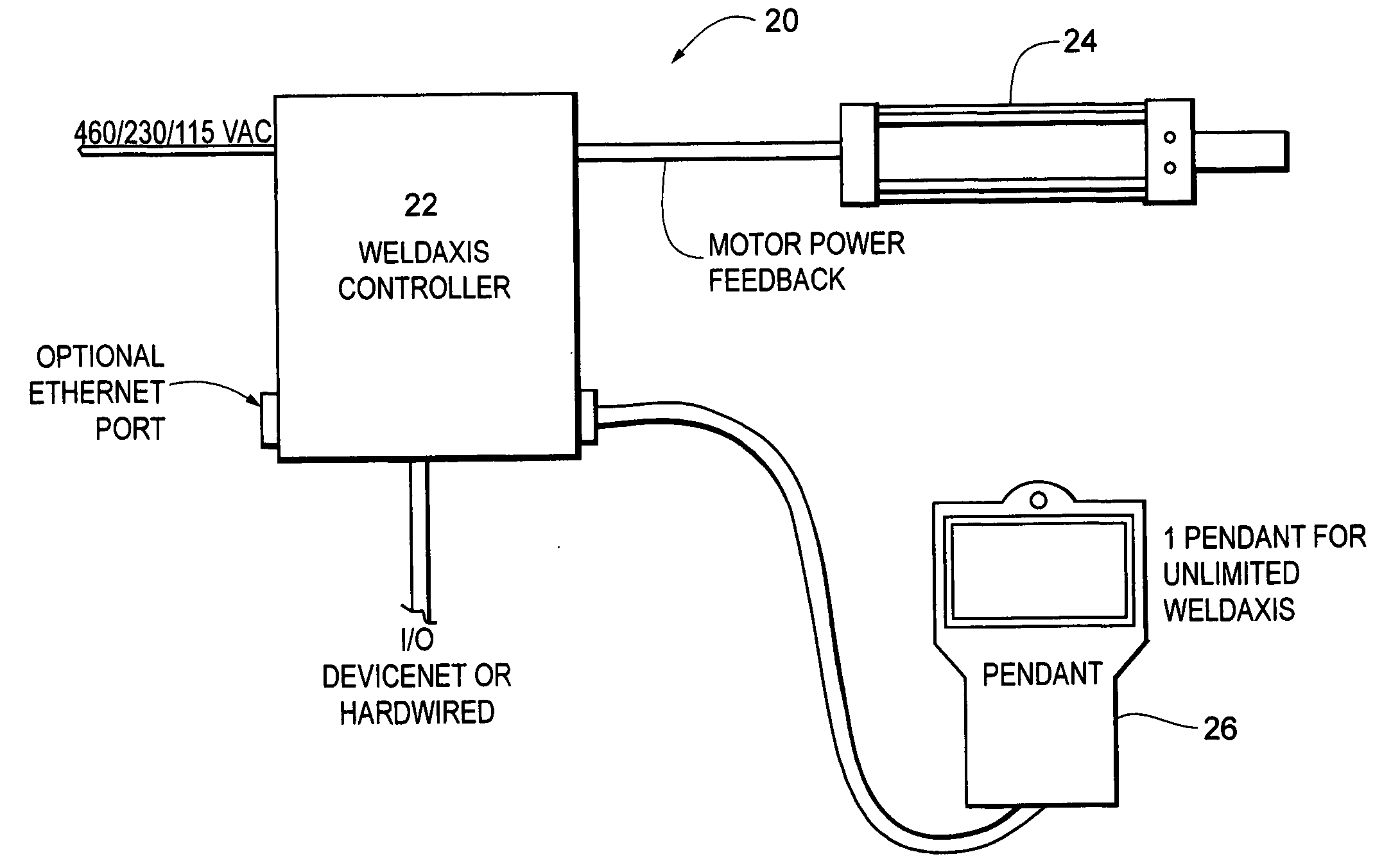
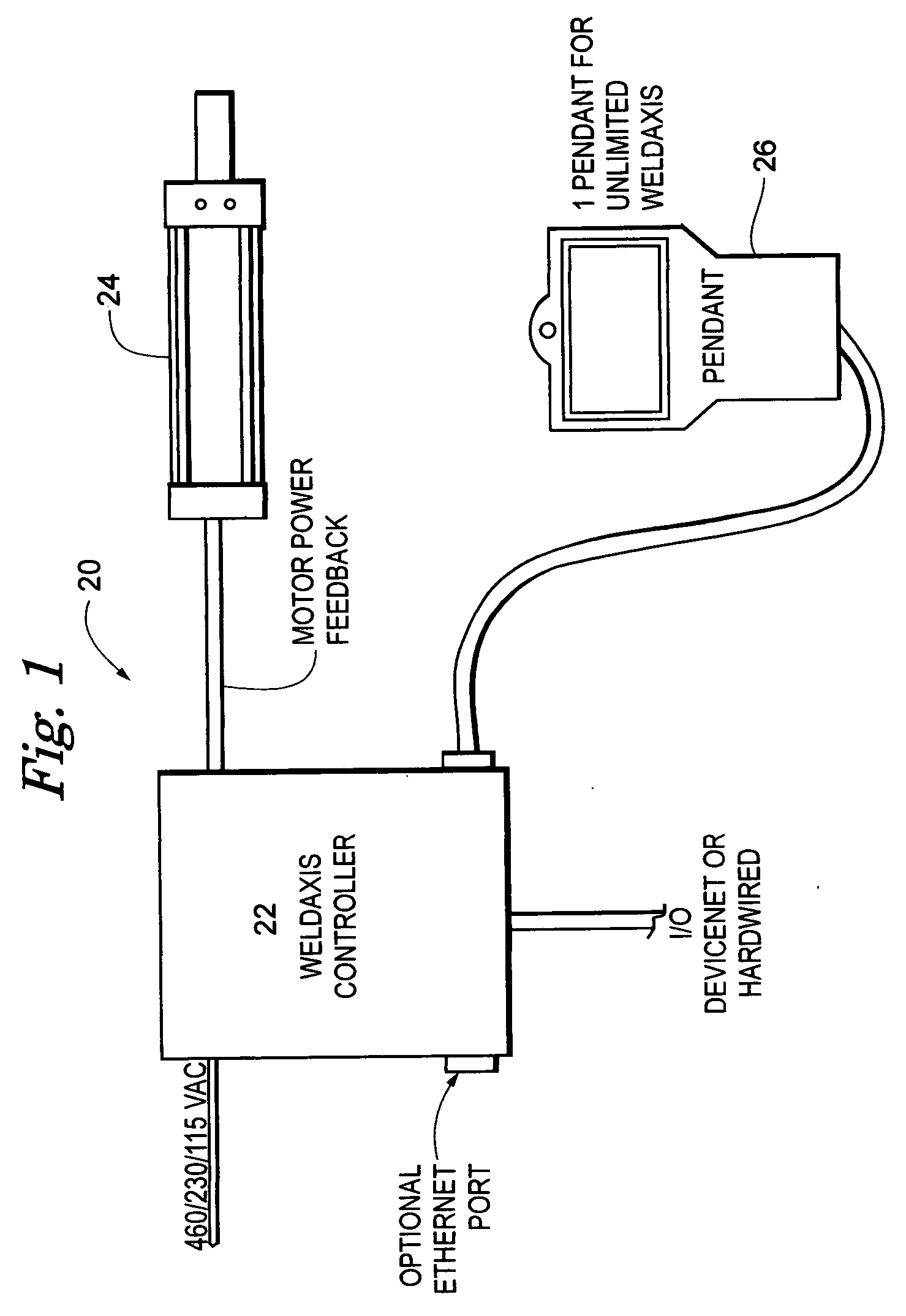
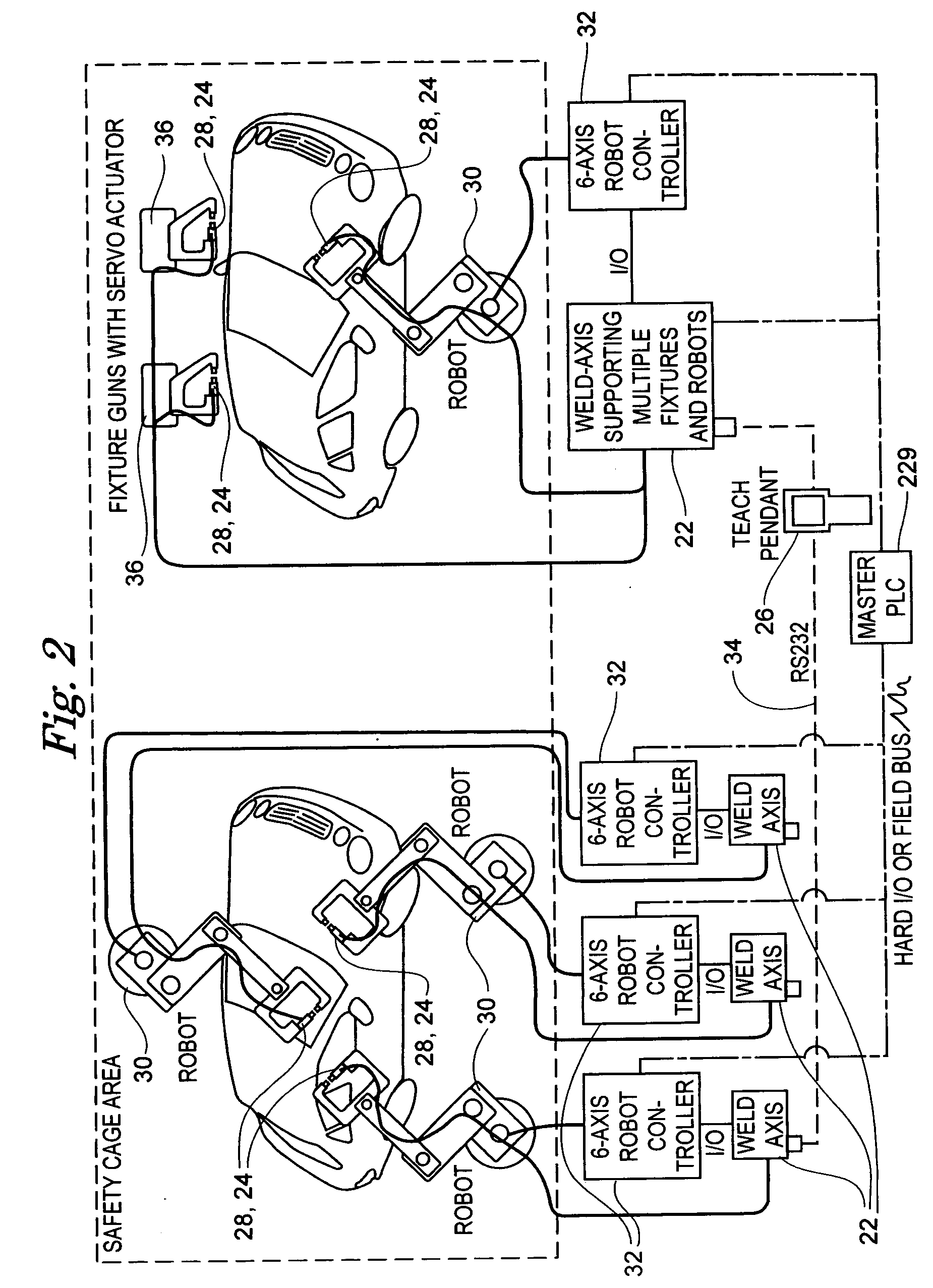
[0024] The present invention comprises, an adaptable servo-control system for force / position actuation in various welding applications including resistance welding, and more specifically, spot welding, applications. In other words, the present invention operates as an independent “weld axis” system. The adaptability of the weld axis system enables the present invention to operate as an interface to existing six-axis robots in both new and retrofit situations, as well as a stand-alone, welding gun fixture. In all situations, the weld axis system is substantially ambivalent to the control scheme and / or programming language in an existing robot but is able to use those inputs / outputs typically used by a pneumatic valve for weld gun actuation to control an electric linear actuator to deliver the desired motion profile and squeeze force that would typically have been delivered by a pneumatic actuator.
[0025] Referring to FIG. 1, a schematic diagram of the weld a...
PUM
| Property | Measurement | Unit |
|---|---|---|
| scan-time | aaaaa | aaaaa |
| thickness | aaaaa | aaaaa |
| pressure | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More