As the number of vehicles such as cars continuously increases,
traffic congestion becomes more critical.
Particularly, there is a serious problem in that the
rate of increase in the number of vehicles is much higher than the rate at which roads and other infrastructures are being expanded.
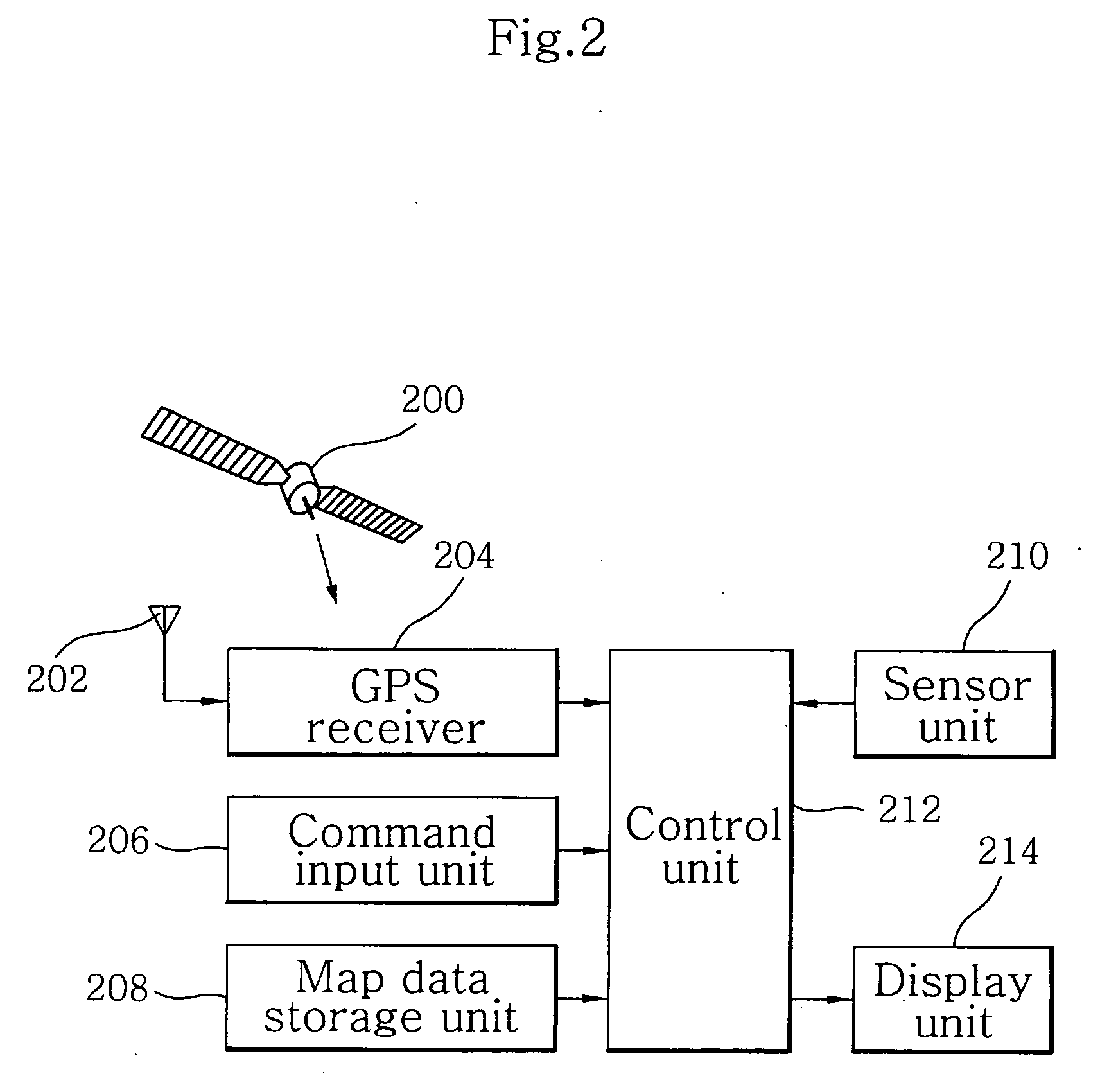
That is, since GPS detects a vehicle location using the GPS
receiver that receives the navigation messages transmitted by the
GPS satellites, it may not detect coordinates of a vehicle location or merely can obtain very incorrect results of detection of the coordinates at areas, including the interiors of tunnels, thickly-wooded forests or downtown areas surrounded by skyscrapers, where the GPS
receiver cannot correctly receive the navigation messages transmitted by the
GPS satellites.
Thus, a deduced reckoning
system for deducing a vehicle location by detecting the travel distance and direction of a vehicle has been employed at areas where a vehicle location cannot be calculated since a GPS
receiver cannot correctly receive navigation messages from GPS satellites.
However, the deduced reckoning
system has disadvantages in that the initial location of the vehicle should be set correctly, and an estimated location of the vehicle is incorrect due to an accumulation of measurement errors inherent to the sensors if the vehicle travels for a long time during a process of deducing the vehicle location using the deduced reckoning
system.
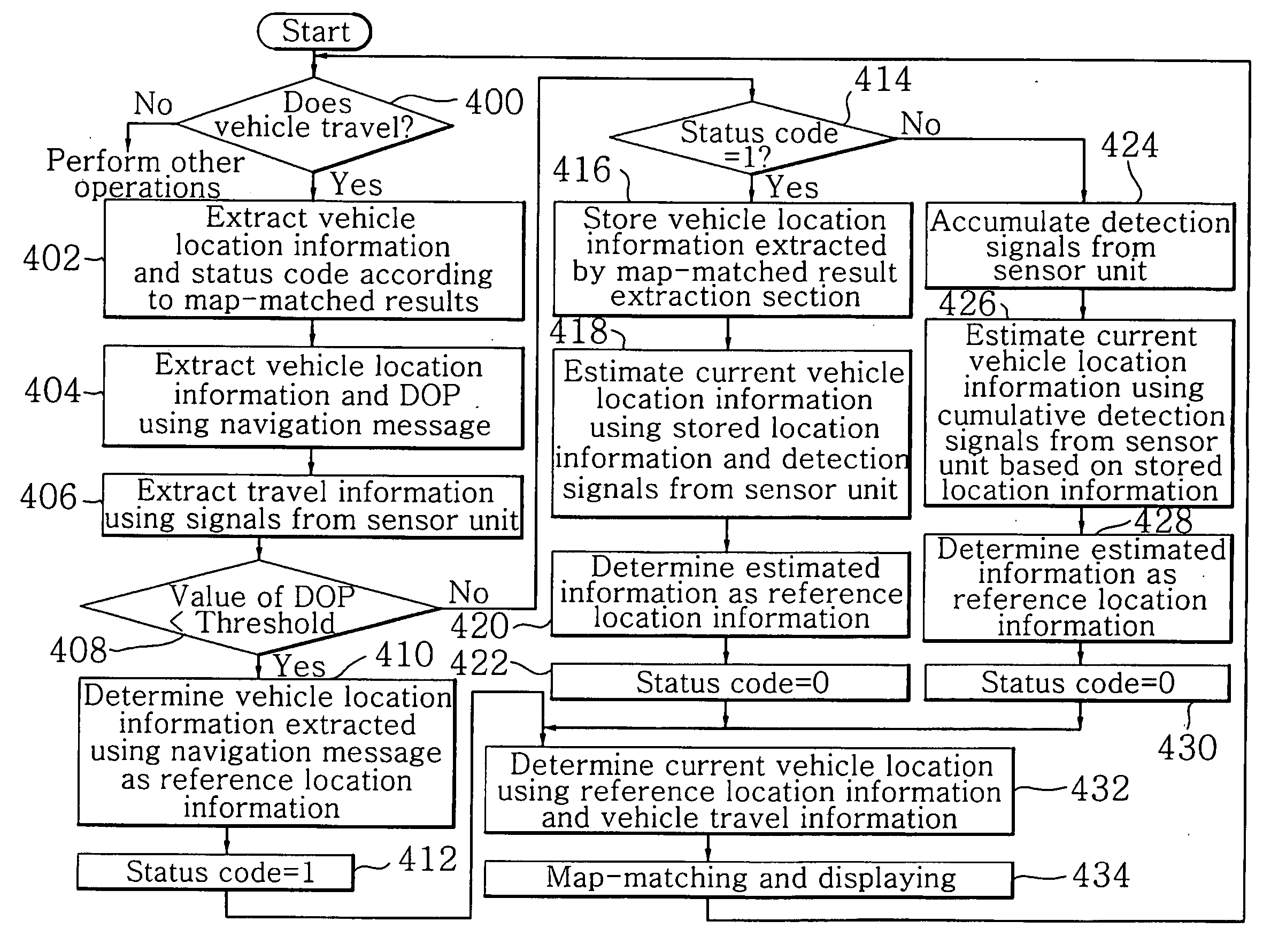
If the value of DOP is equal to or greater than 6, this cannot be utilized due to many errors in the position of the GPS receiver detected from the received navigation messages.
Thus, errors in the vehicle location detected using the detection signals from the sensors are continuously accumulated.
Accordingly, there is a problem in that the difference between an actual vehicle location and a vehicle location detected using the detection signals from the sensors increases continuously with time.
However, the detection of a vehicle location using only the detection signals from the sensors, i.e. a travel angle difference and traveled distance, contains a little error in the detected vehicle location in view of characteristics of the sensors.
Such a prior art has a problem in that since a current vehicle location is detected with respect to a just previously detected vehicle location, errors
in vehicle locations detected using the detection signals from the sensors are continuously accumulated and thus the difference between an actual vehicle location and a detected vehicle location increases with time.
However, since the traveled distance of the vehicle is estimated by multiplying the number of pulse signals, which are generated from the
odometer, by only the predetermined distance conversion coefficient in the prior art, a large difference occurs between an actual vehicle location and a detected vehicle location according to the travel speed of the vehicle.
Further, the travel angle difference of the vehicle detected by an output
signal from the
gyroscope cannot correctly reflect a 3D gradient of a road on which the vehicle travels.
Moreover, the traveled distance of the vehicle detected by the
odometer cannot also reflect a fore-and-aft gradient of a road on which the vehicle travels.
These become causes of the occurrence of errors in the determination of a vehicle location, resulting in a large difference between the traveled distance and a traveled distance on a plane of an actual map.
Although there has been proposed a method using a cumulative
inclinometer to reduce such errors, measurement errors are continuously accumulated in the cumulative
inclinometer.
Thus, an estimated vehicle location becomes incorrect with time.
Further, at a junction of an overpass and a surface street, what road a vehicle enters or exits from cannot be correctly determined.
Therefore, there is a problem in that errors occur in performing map-matching of a vehicle location on a digital map.



 Login to View More
Login to View More  Login to View More
Login to View More