

Method of 3D panoramic mosaicing of a scene
a technology scene, applied in the field of 3d panoramic mosaicing of scene, can solve the problems of stereoscopic system restoration, difficult calibration of cameras, inaccurate 3d reconstruction,
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
first embodiment
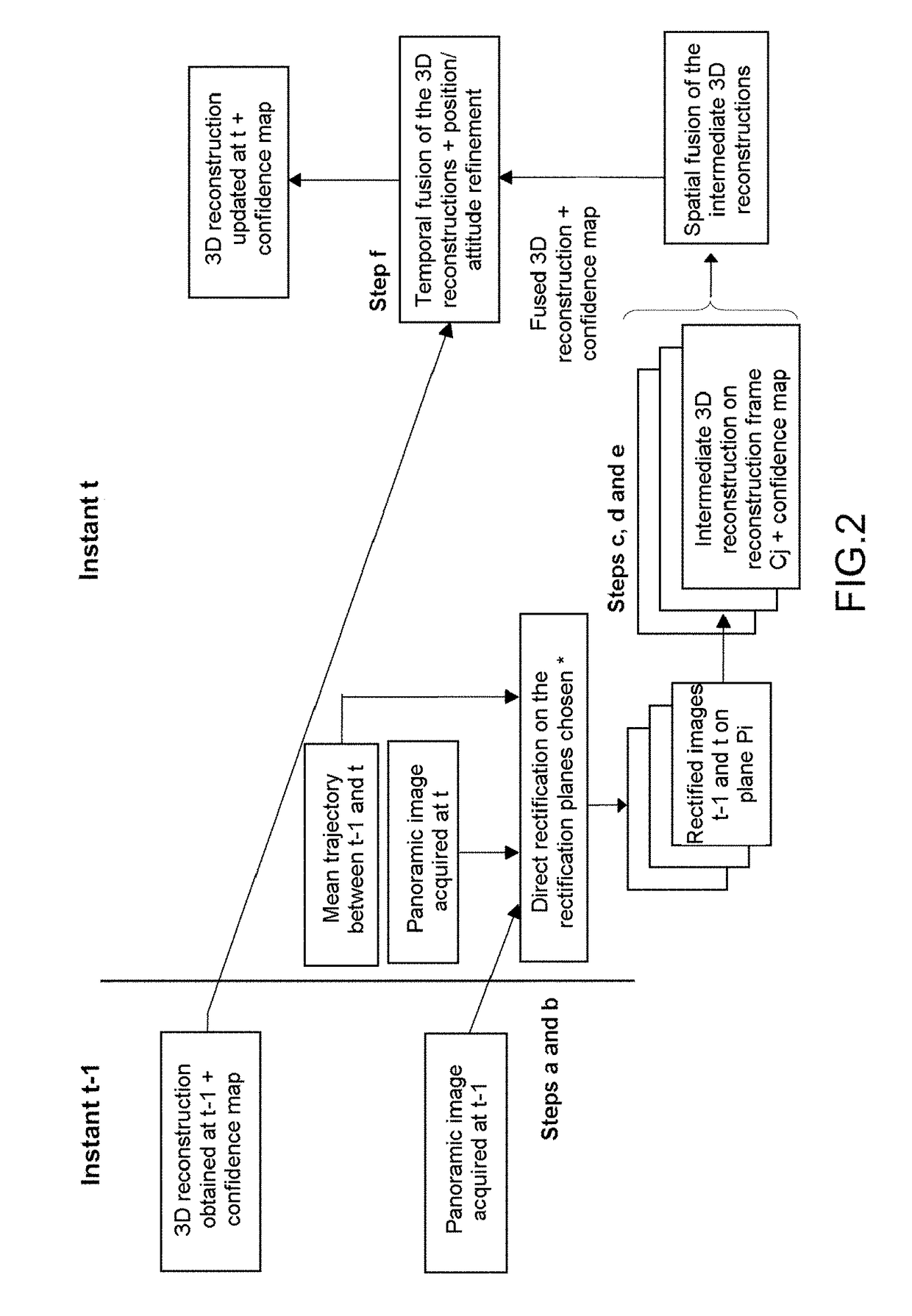
[0145] the 3D reconstruction and the mosaicing are performed in a successive manner after each acquisition; this assumes that a new 3D reference reconstruction has just been performed subsequent to (one or more) 3D reconstructions already performed.
second embodiment
[0146] the 3D reconstruction and the mosaicing are performed in parallel after each acquisition; this assumes that the mosaicing is performed whilst a new 3D reconstruction is still in progress, in which case the 3D reference reconstruction is that performed at one of the previous acquisitions of 2D images, or indeed a 3D reconstruction performed previously.
[0147]These various steps will be described in greater detail.
[0148]A) Choosing 3D projection planes (or surfaces).
[0149]This first step consists in choosing the 3D projection planes or surfaces on which the mosaic is constructed. These 3D projection planes or surfaces can be chosen freely by the operator at a given moment of the mosaicing or computed automatically on the basis of the current (or reference) 3D reconstruction of the scene according to predetermined criteria (for example planes parallel to the reconstructed surface of the ground or principal planes extracted from the 3D reconstruction). 3D projection surfaces may a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More