

Distance estimation apparatus, distance estimation method, storage medium storing program, integrated circuit, and camera
a distance estimation and distance estimation technology, applied in the field of distance estimation apparatus, distance estimation method, storage medium storing program, integrated circuit, etc., can solve the problems of inability to obtain a uniquely determined distance calculation, unsuitable triangulation for applications, and a relatively long time-consuming and laborious to obtain 3d information of the entire target space. , to achieve the effect of the same advantageous
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
first embodiment
[0146]The first embodiment of the present invention will now be described with reference to FIGS. 1 to 5.
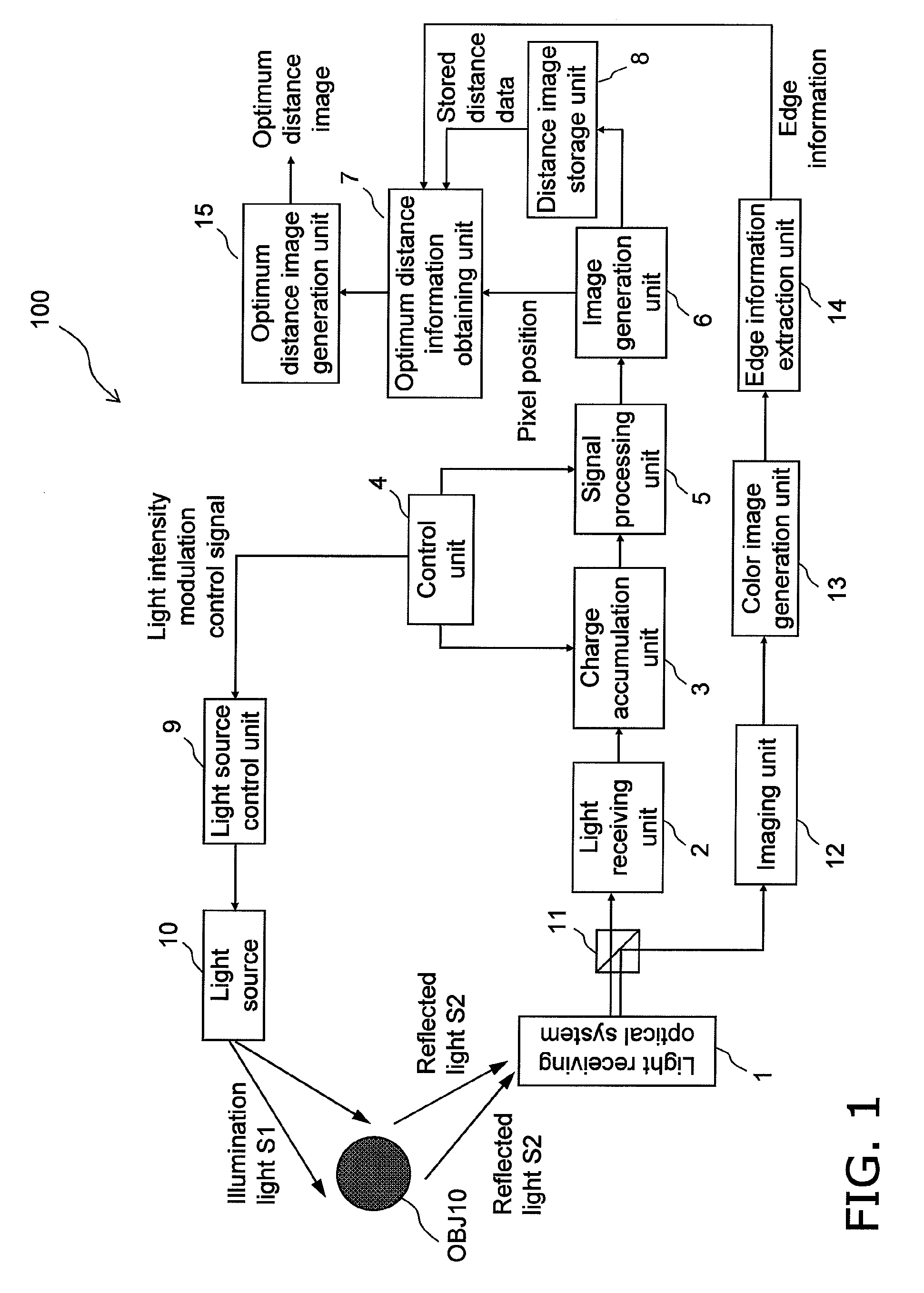
[0147]FIG. 1 is a schematic block diagram of a distance estimation apparatus 100 according to the first embodiment.
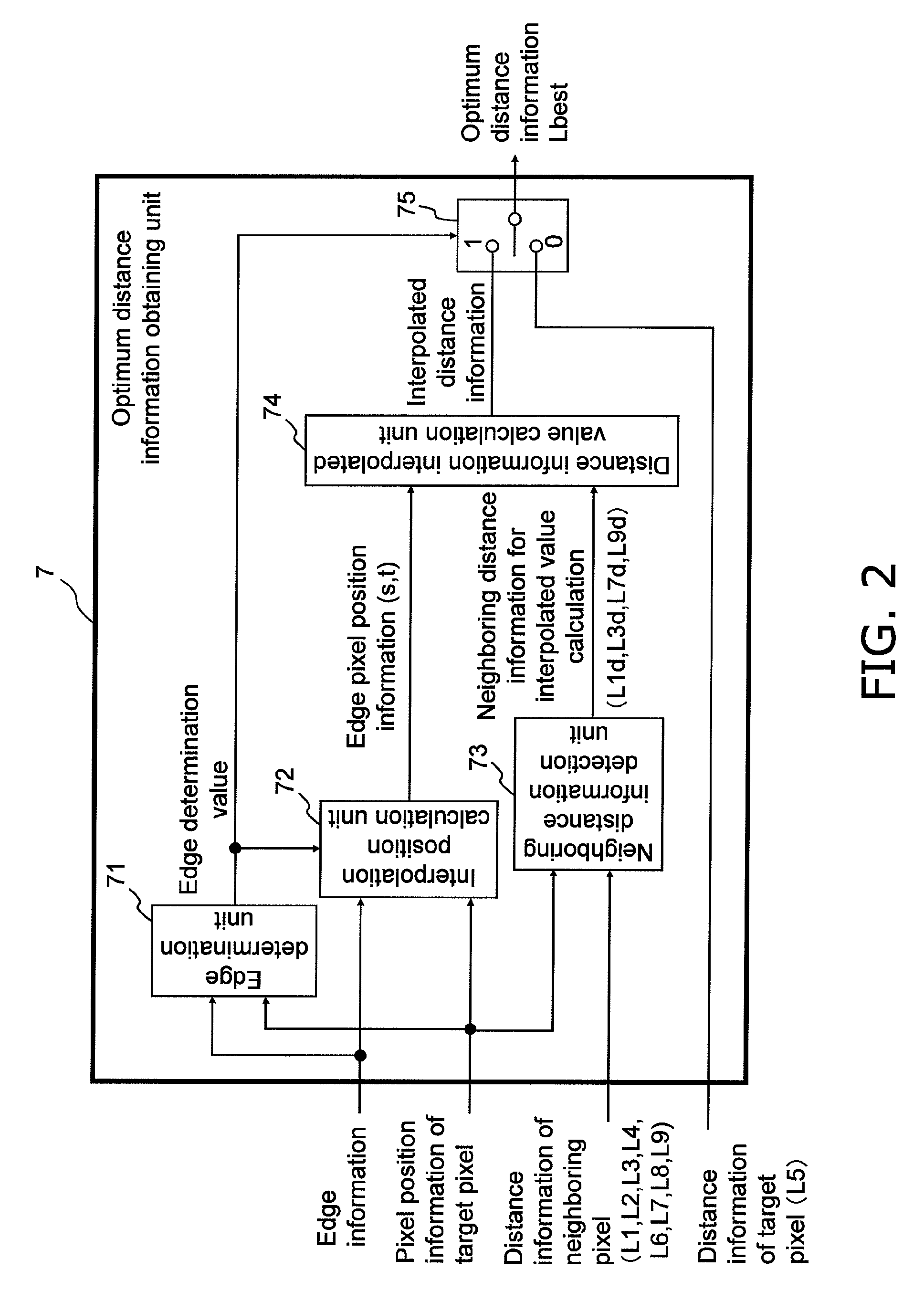
[0148]FIG. 2 is a schematic block diagram of an optimum distance information obtaining unit 7 included in the distance estimation apparatus 100 of the first embodiment.
[0149]FIGS. 3A and 3B schematically show an overview of image interpolation performed with a distance estimation method according to the first embodiment.
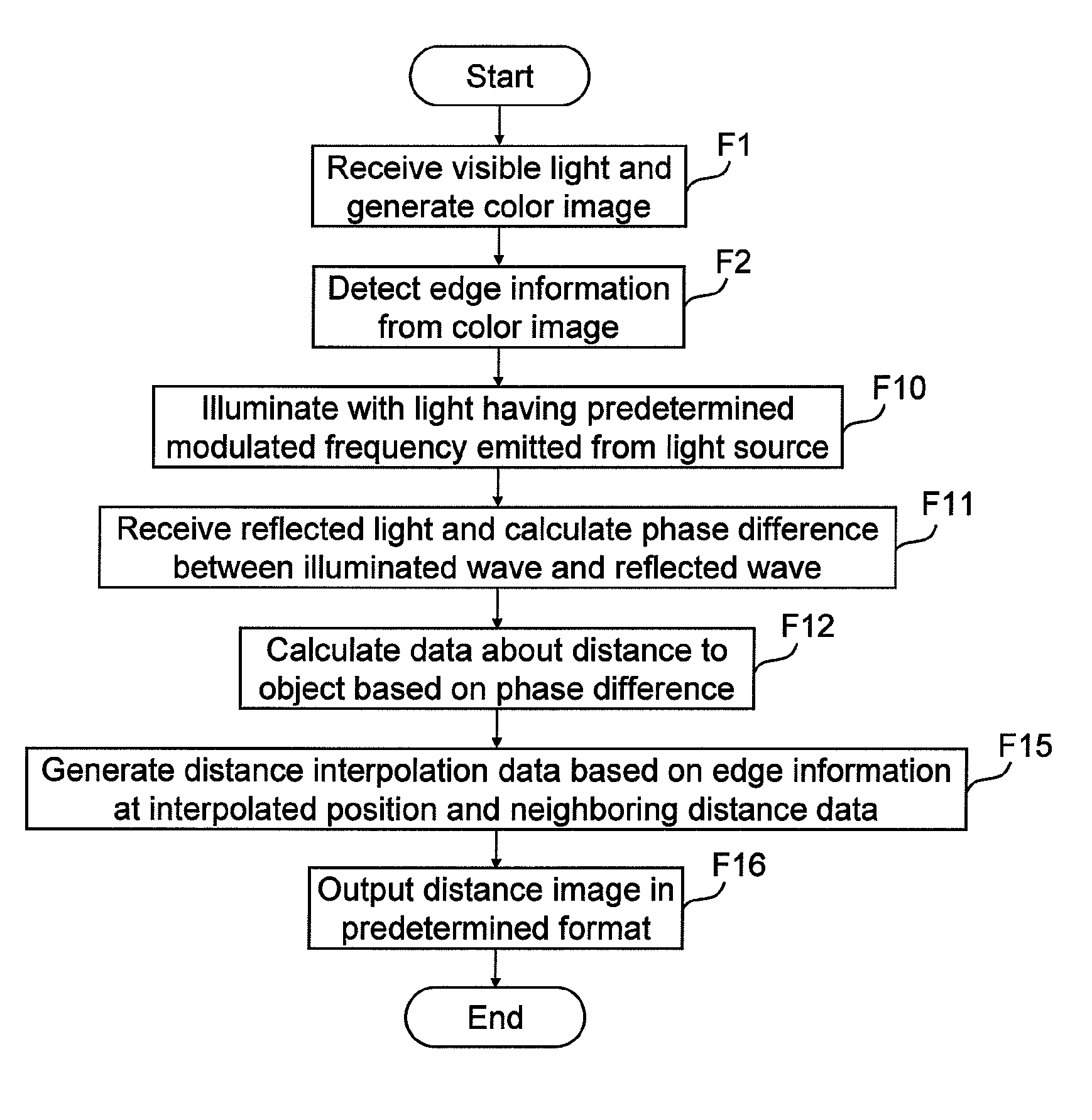
[0150]FIG. 4 is a flowchart showing the processing performed with the distance estimation method of the first embodiment.
[0151]FIG. 5A schematically shows an overview of second image interpolation (first modification) and FIG. 5B schematically shows an overview of third image interpolation (second modification) performed with the distance estimation method of the first embodiment.
[0152]The distance estimation apparatus and the distance estimation meth...
first modification
[0243]Alternatively, the distance estimation apparatus 100 may perform distance information interpolation with a modified method described below instead of the above method described with reference to FIGS. 3A and 3B. The first modified method will now be described with reference to FIG. 5A. In FIG. 5A, the processing part that is the same as the processing described with reference to FIGS. 3A and 3B is shown in the same manner as in FIGS. 3A and 3B and will not be described.
[0244]As shown in FIG. 5A, the distance estimation apparatus 100 first determines whether a block (image area) in the color image corresponding to the target pixel of the distance pixel (target pixel of the light receiving element for distance estimation) includes edge information. (B) When the target pixel of the distance image includes no edge information, the distance estimation apparatus 100 determines that the target pixel belongs to a flat area, and outputs distance information of the target pixel of the d...
second modification
[0251]Alternatively, the distance estimation apparatus 100 may perform distance information interpolation using another modified method described below instead of the method described with reference to FIGS. 3A and 3B. The second modified method will now be described with reference to FIG. 5B. In FIG. 5B, the processing part that is the same as the processing described with reference to FIGS. 3A and 3B is shown in the same manner as in FIGS. 3A and 3B and will not be described.
[0252]As shown in FIG. 5B, the distance estimation apparatus 100 first determines whether a block (image area) in the color image corresponding to the target pixel of the distance pixel (target pixel of the light receiving element for distance estimation) includes edge information.
[0253](B) When the target pixel of the distance image includes no edge information, the distance estimation apparatus 100 determines that the target pixel belongs to a flat area, and outputs distance information of the target pixel o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More