

Double-foot robot lower limb mechanism with multiple freedom degree
A bipedal robot, the technology of degrees of freedom
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention is described in more detail below in conjunction with accompanying drawing example:
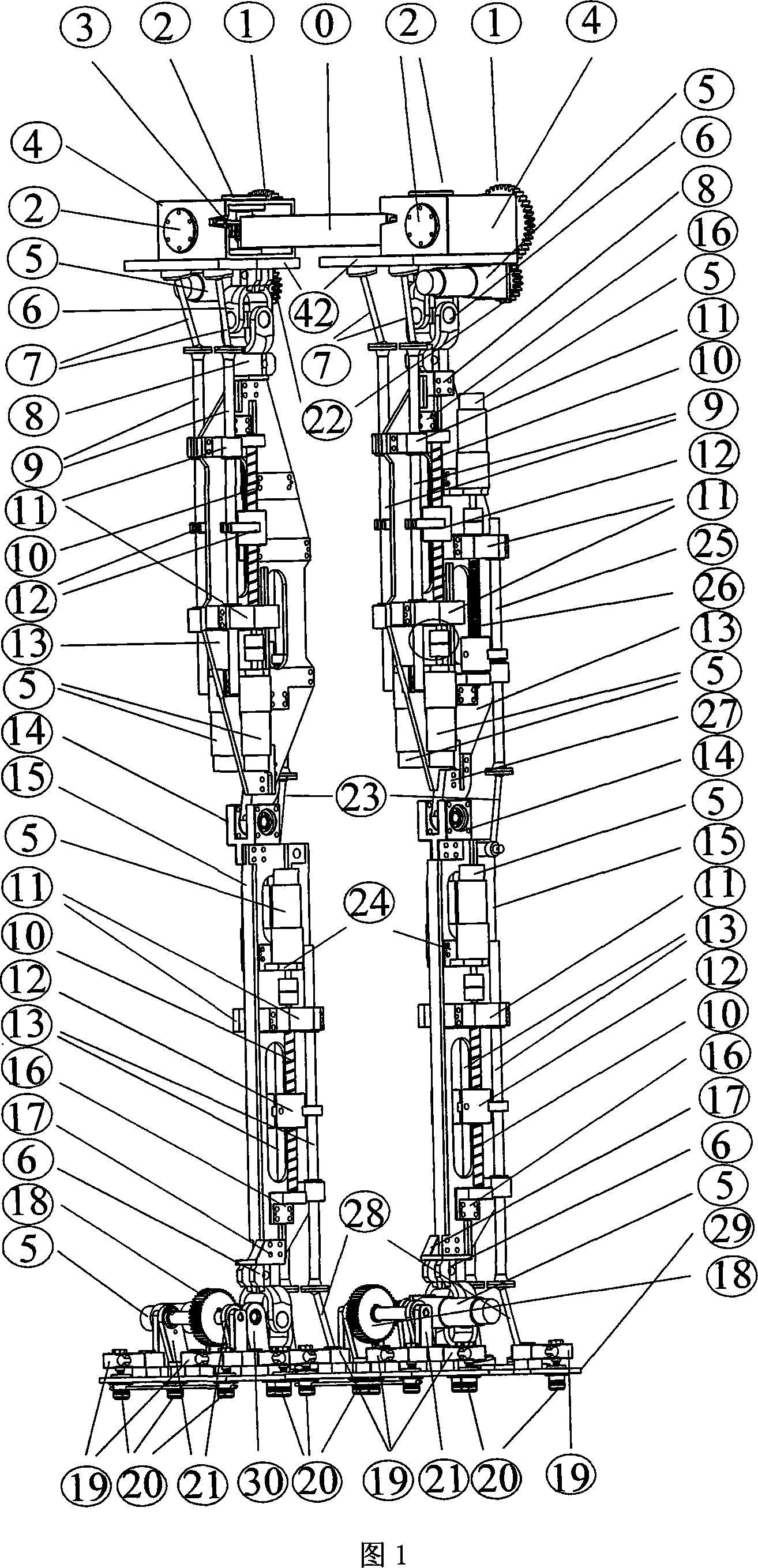
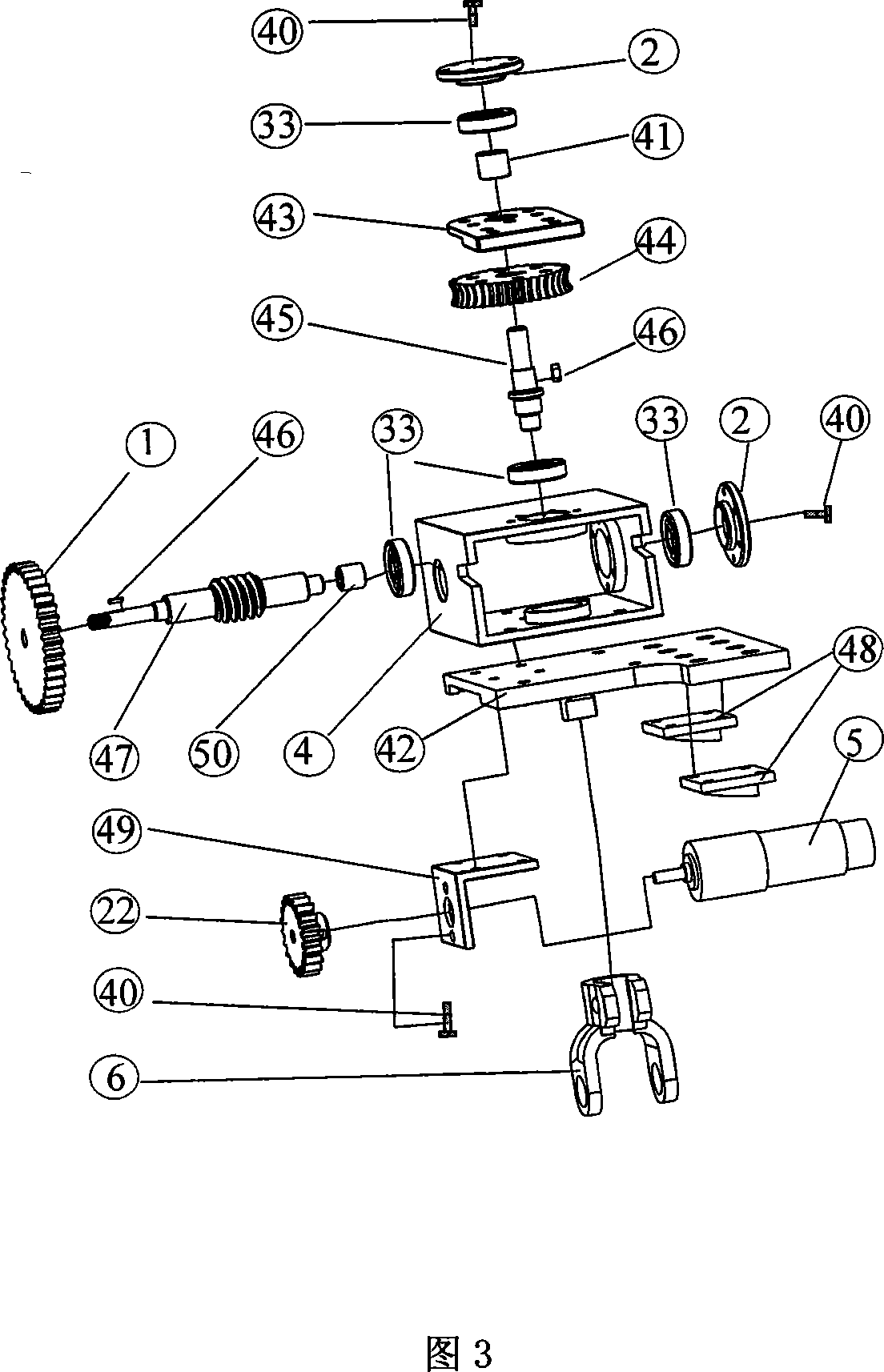
[0032] 1, the present invention includes: waist connecting plate 0, hip joint driven gear 1, bearing end cover 2, worm gear transmission 3, box body 4, DC motor 5, Hooke hinge 6, connecting rod 7, hip joint connection Block 8, long guide rod 9, long lead screw 10, angular contact bearing seat 11, ball nut connection block 12, thigh plate 13, calf knee joint connection block 14, calf plate 15, needle roller bearing seat 16, calf ankle joint connection Block 17, foot driven gear 18, pressure sensor 19, shock absorber 20, driven shaft support 21, hip joint driving gear 22, knee joint connecting rod 23, motor seat 24, short guide rod 25, short lead screw 26 , Thigh knee joint connecting block 27, ankle joint connecting rod 28, sole plate 29, motor shaft support 30 and hip joint plate 42 etc.
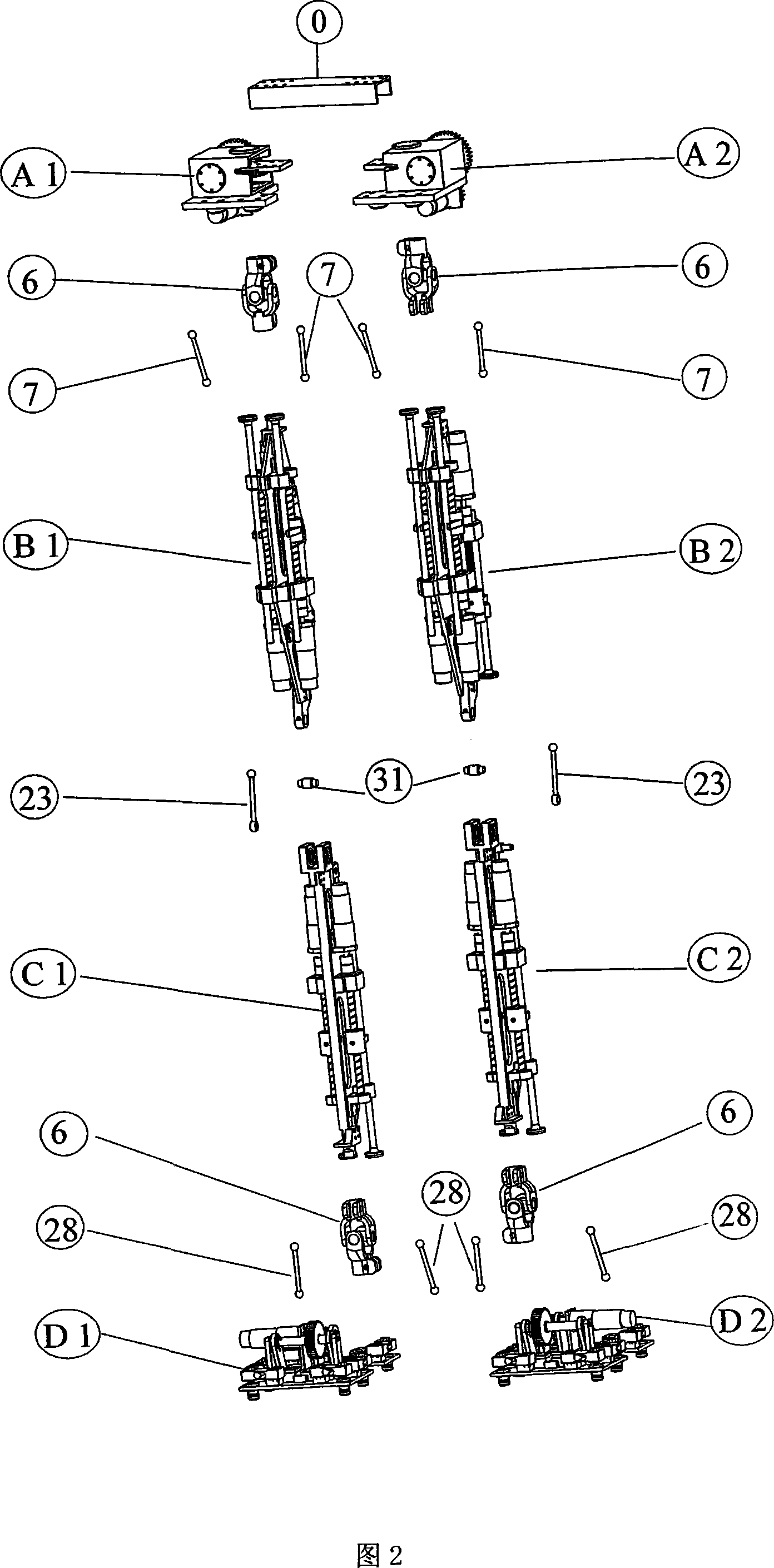
[0033] In conjunction with Fig. 2, it is an exploded view of the overall str...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More