

Decoupled false shaft machine tool and two-rotary and one-moving parallel connection mechanism
A technology of robots and machine tools, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as low motion precision, inconvenient control, complex structure, etc., and achieve the effects of small moment of inertia, simple control, and fast motion response
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
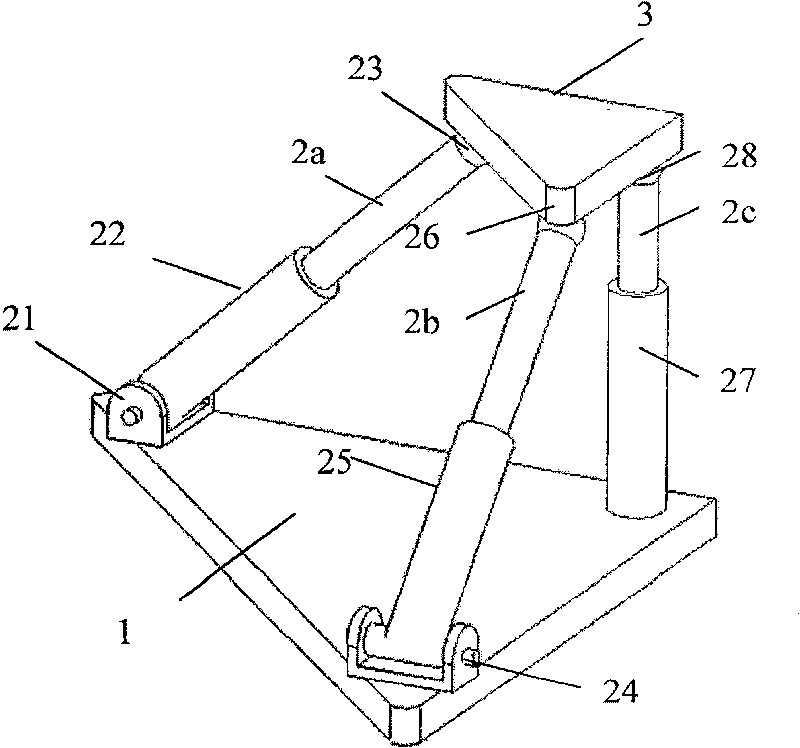
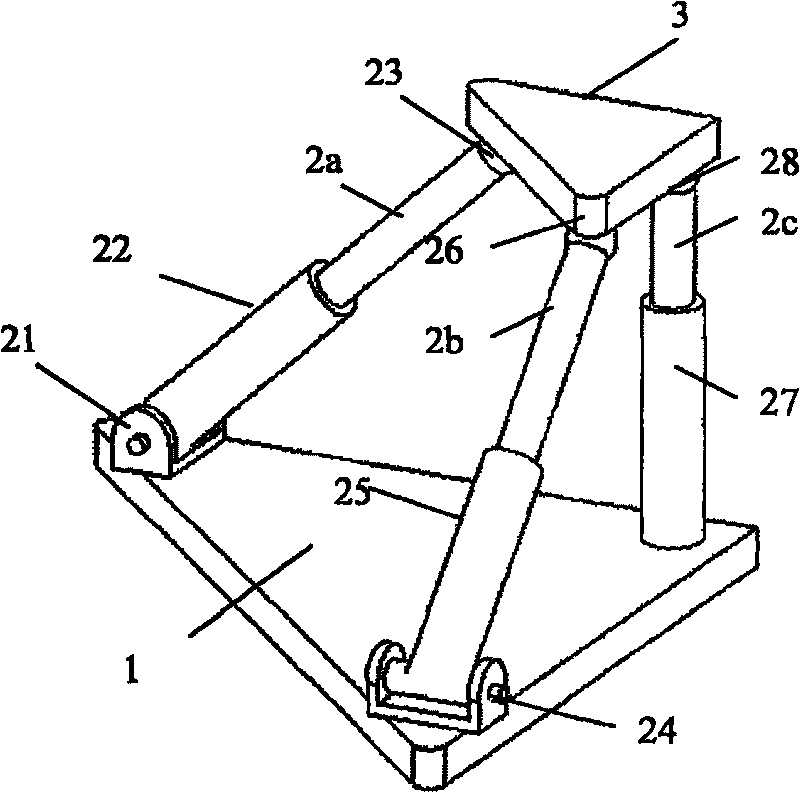
[0018] A two-rotation-one-movement parallel mechanism for the decoupling of virtual-axis machine tools and robots, consisting of a frame 1, a moving platform 3, and a No. 2b, the No. 3 motion branch chain 2c is composed of the No. 1 motion branch chain 2a and the No. 2 motion branch chain 2b having the same structure, including No. 1 rotating pair 21, No. 2 rotating pair 24, No. 1 moving pair 22, and No. 2 moving pair Auxiliary 25 and No. 1 ball hinge 23, No. 2 ball hinge 26 and bar, described No. 1 revolving pair 21, No. 2 revolving pair 24 are fixed on the frame 1, and the axis extension lines are mutually orthogonal, and described one No. mobile pair 22, No. 2 mobile pair 25 are perpendicular to No. 1 rotating pair 21, No. 2 rotating pair 24 axes, and No. 3 motion branch chain 2c comprises No. 3 moving pair 27, No. 3 ball hinge 28 and bar, described The No. 3 mobile pair 27 of the No. 3 motion branch chain 2c is vertically fixed on the frame 1, and the No. 1 ball hinge 23, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More