

Apery robot center forward competition real-time emulation system
A humanoid robot and real-time simulation technology, which is applied in software simulation/interpretation/simulation, instruments, special data processing applications, etc., can solve the problems that the improvement of mechanism body control is not effective, and the actual physical model cannot be constructed, so as to improve efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
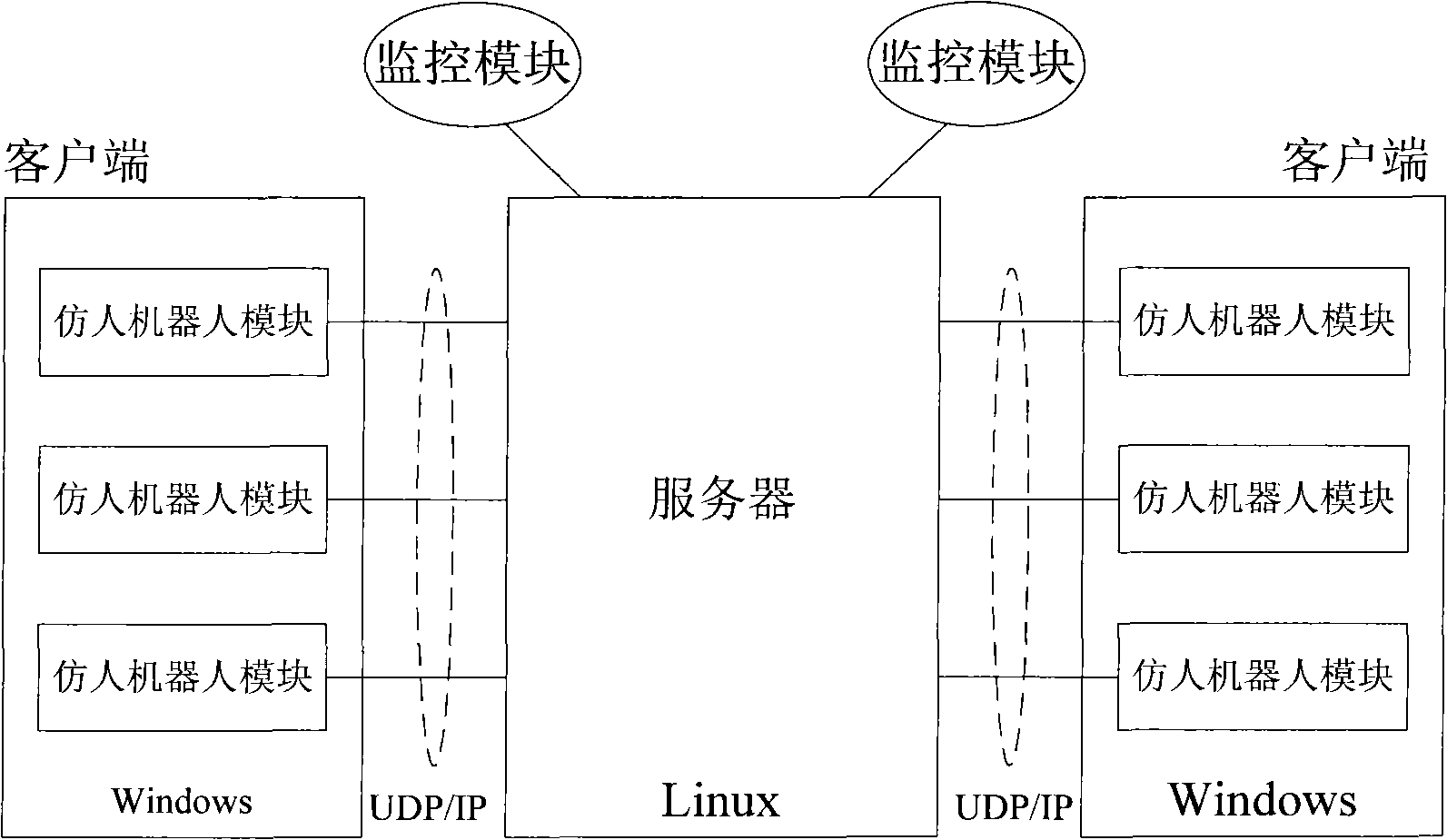
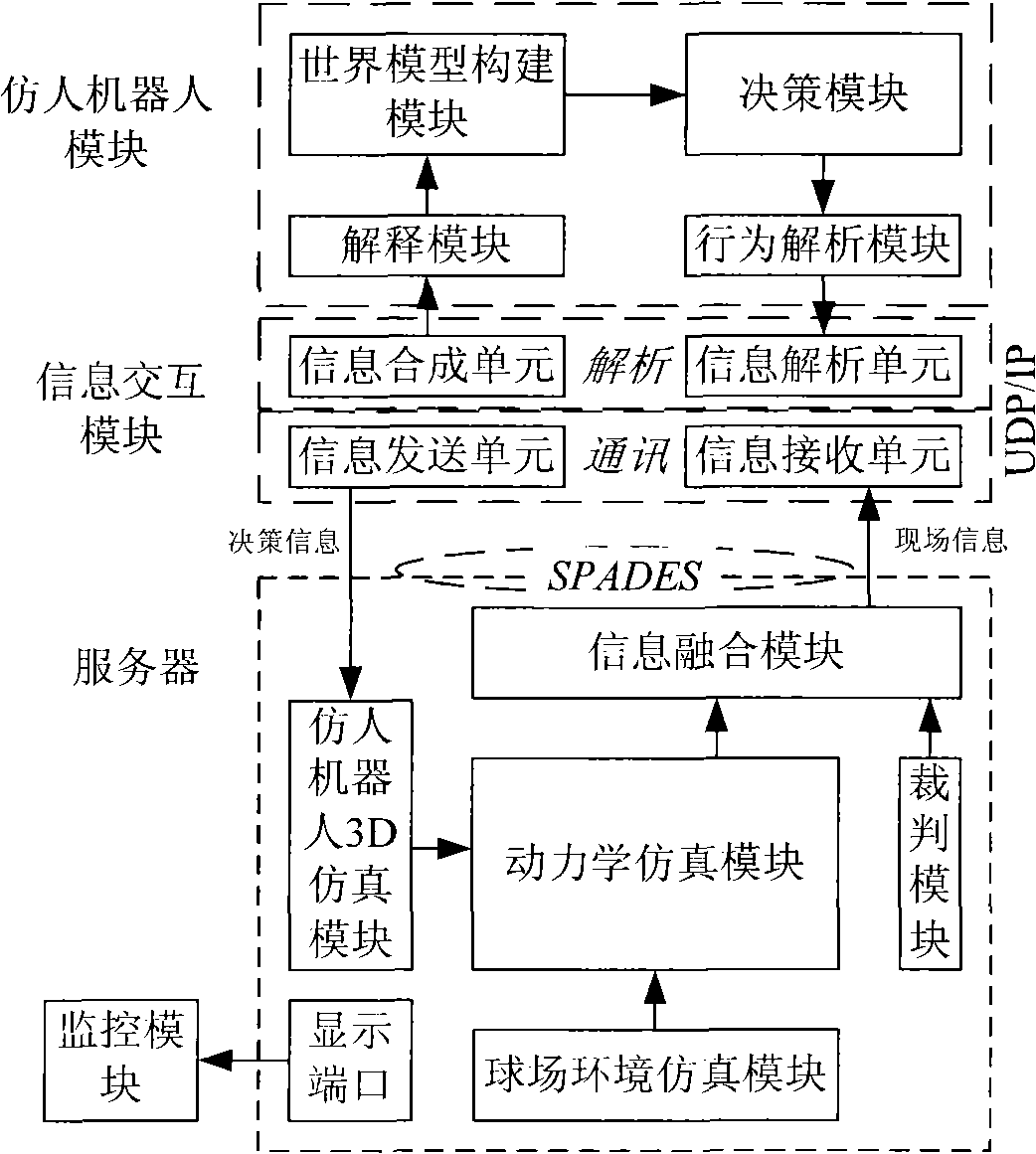
[0015] Such as figure 1 As shown, this embodiment includes an imitation client, a server, a monitoring module and an information interaction module. Three humanoid robot module processes are running on each client, and the client is connected to the server through the information interaction module through the UDP / IP communication protocol, and the competition process on the server is displayed in real time through the monitoring module. The specific structure of each module is as follows: figure 2 shown.
[0016] 1. Client. Each client includes three humanoid rob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More