

Crawler type multi-arm rod mobile robot
A mobile robot and crawler technology, applied in the field of mobile robots, can solve problems such as small application range, and achieve the effect of not easy to fall off and jam, high strength and good flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
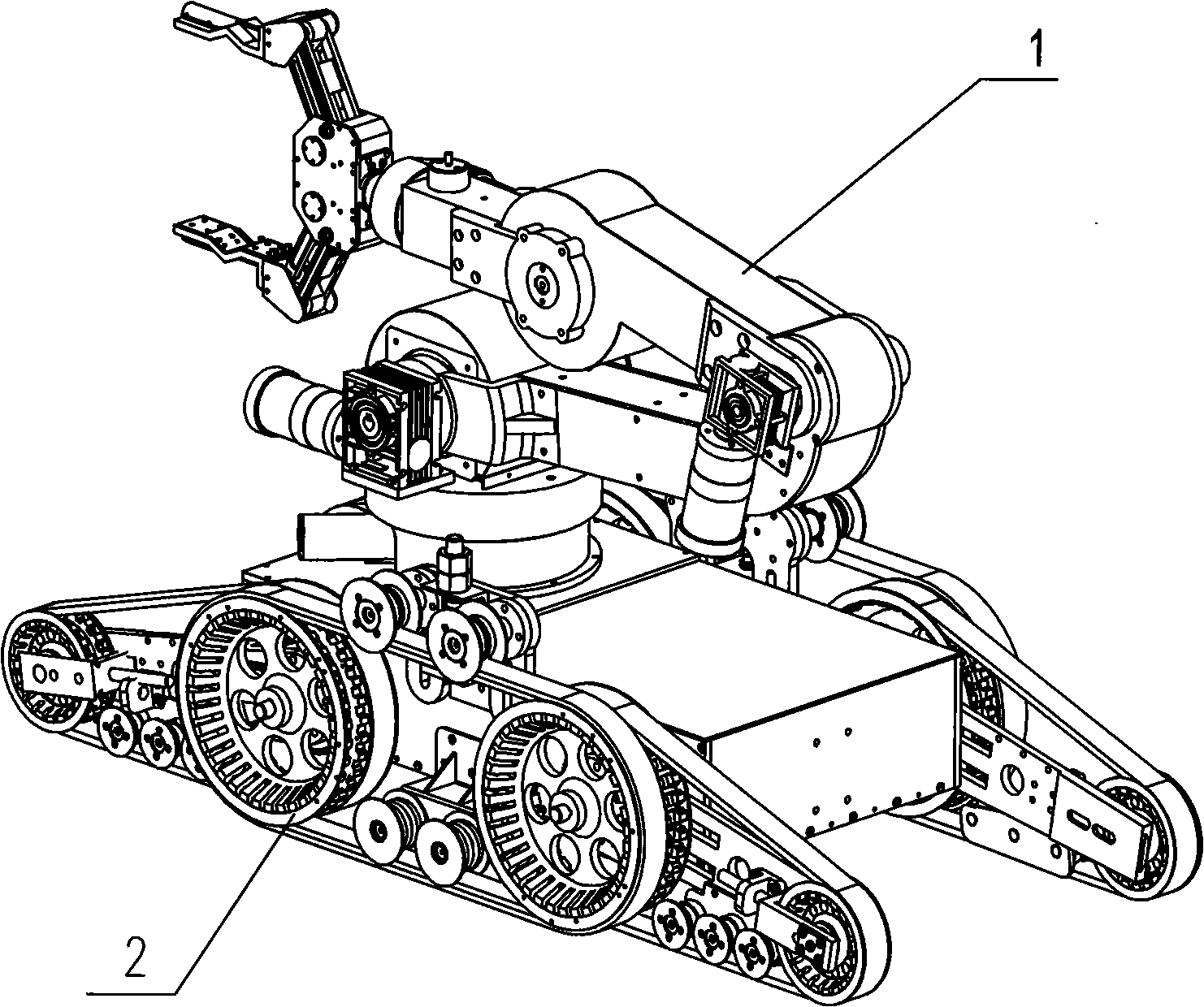
[0067] Embodiment 1 Three-segment crawler-type three-arm rod with 6 degrees of freedom mobile robot
[0068] see figure 1 , it can be seen that the three-segment crawler-type three-arm 6-degree-of-freedom robot of this embodiment is mainly composed of an upper and lower part of an arm working device 1 and a crawler-type walking device 2 . The arm working device 1 realizes 360° movement on the horizontal plane and 180° on the sky surface, and completes human arm bionic actions such as grabbing, pushing, pulling, and lifting.
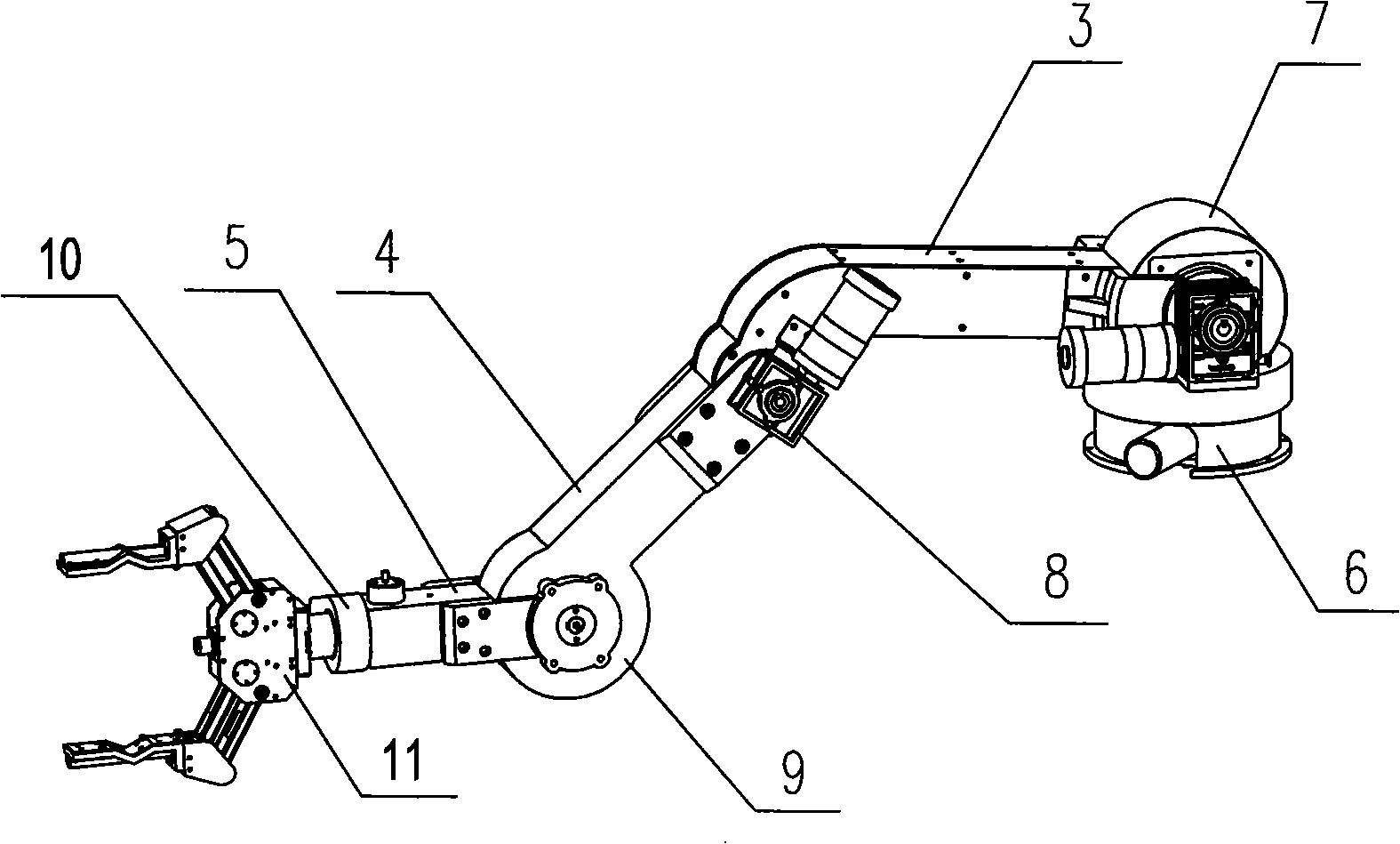
[0069] The assembly effect of the arm working device 1 is as follows figure 2 shown. It includes a waist swivel joint 6, a large arm 3, a middle arm 4, a small arm 5, and a claw device 11, and they respectively pass through the large arm joint 7, the middle arm joint 8, the small arm joint 9, and the wrist swivel joint. Joint 10 connections. Each joint and gripper device 11 has its own motor reducer, which can produce motion, and this motion is gen...
Embodiment 2
[0082] The walking device of embodiment 2 single crawler type mobile robot
[0083] In order to further reduce the overall weight of the mobile robot, the crawler-type traveling device 2 can preferably be made into a single crawler.
[0084] The single crawler type traveling device is characterized by reducing the number of crawlers, simplifying the structure of the crawler wheels, and simplifying the transmission structure. Its side view is as Figure 13 shown. It can be seen that each side of the box includes 2 walking track wheels 40 and 1 elevation angle tensioning track wheel 87, a walking track 41 and a tensioning bracket 88. There are 4 walking support wheels 44 between the walking track wheels 40 . The elevation angle of the tensioning track wheel 87 is 35°. Owing to adopting the design that the elevation angle is fixed, the elevation angle tensioning track wheel 87 may not need to be connected with the transmission mechanism, thereby simplifying the structure. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More