

Walking telescopic arm type remote control digging machine
A telescopic arm and telescopic technology, which is applied to earth movers/shovels, mechanically driven excavators/dredgers, construction, etc., can solve the problems of many safety hazards, large fuel consumption, and many auxiliary facilities, and achieve Avoid personal safety accidents, avoid tail gas pollution, and have significant economic benefits
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
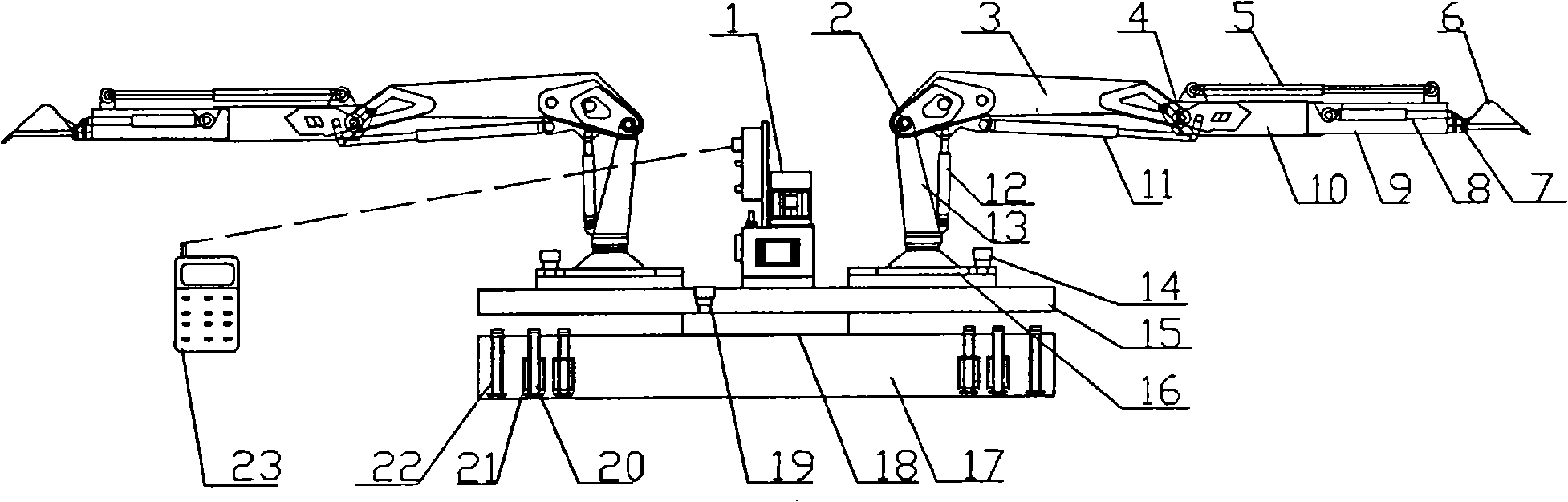
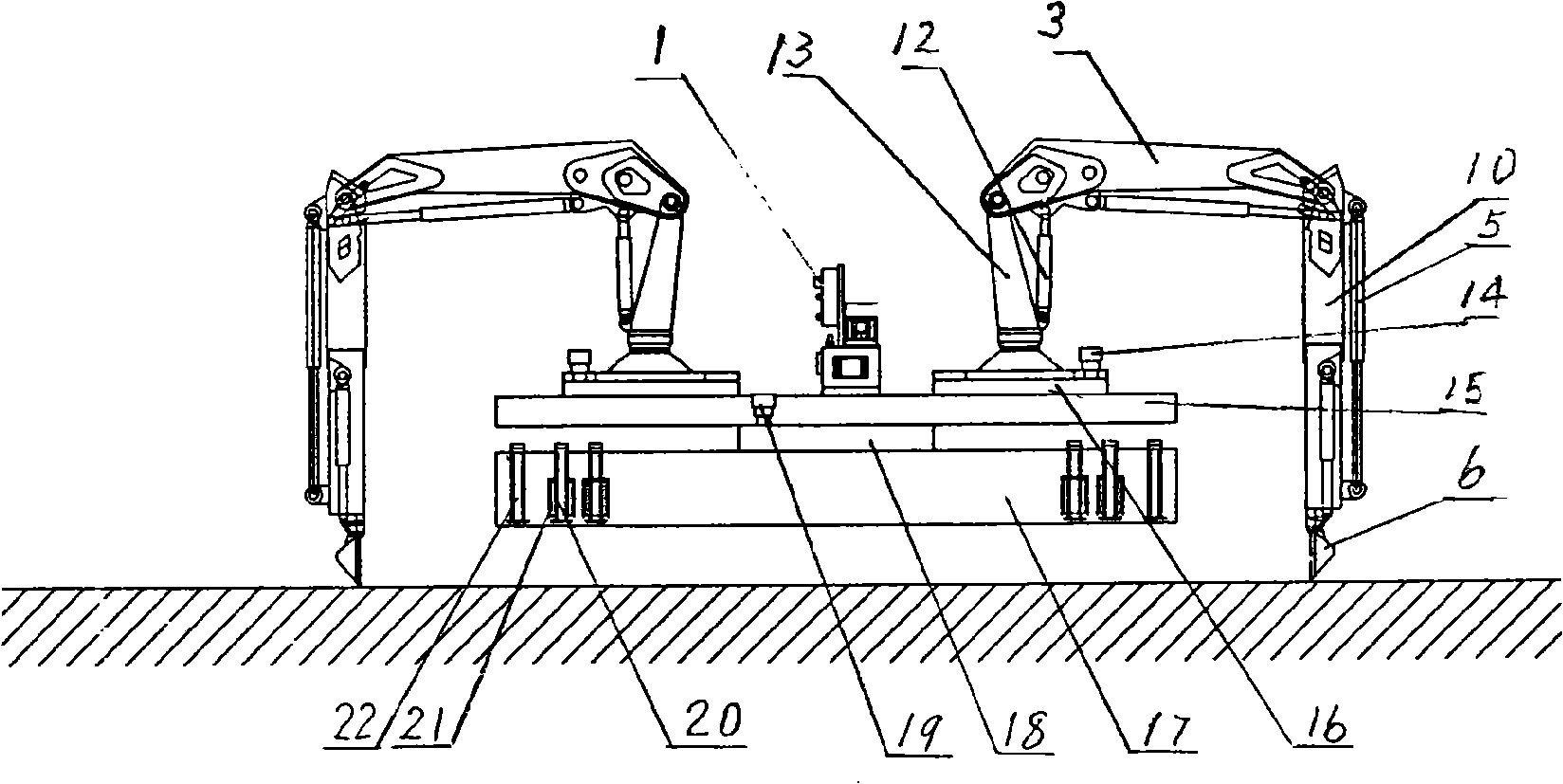
[0025] The present invention will be further described below in conjunction with accompanying drawing.
[0026] The present invention installs walking telescopic arm type remote control excavator on the upper platform 15 of the chassis, two 180 ° directions are symmetrically installed, and a set of electric hydraulic pump station is installed in the middle of the upper platform 15 to provide power for the excavator. A special-purpose walking mechanism is installed on the lower platform of the chassis, and a counterweight is set in the lower platform 17 to make the whole machine work stably. After the two excavators support the complete machine off the ground, the lower platform 17 can be rotated to realize walking in any direction of the complete machine. Under the control of the remote control device, the two excavators can carry out excavation independently. The upper and lower platforms rotate relatively when the whole machine needs to walk, and are fixed together when dig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More