

Multi-degree of freedom hand-prosthesis based on multi-force sensing resistance transducer
A technology of force-sensitive resistors and control devices, applied in prosthesis, medical science, etc., can solve problems such as poor bionic performance, few control modes, and weak anti-interference ability, and achieve high accuracy, natural movement, high sensitivity and accuracy degree of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
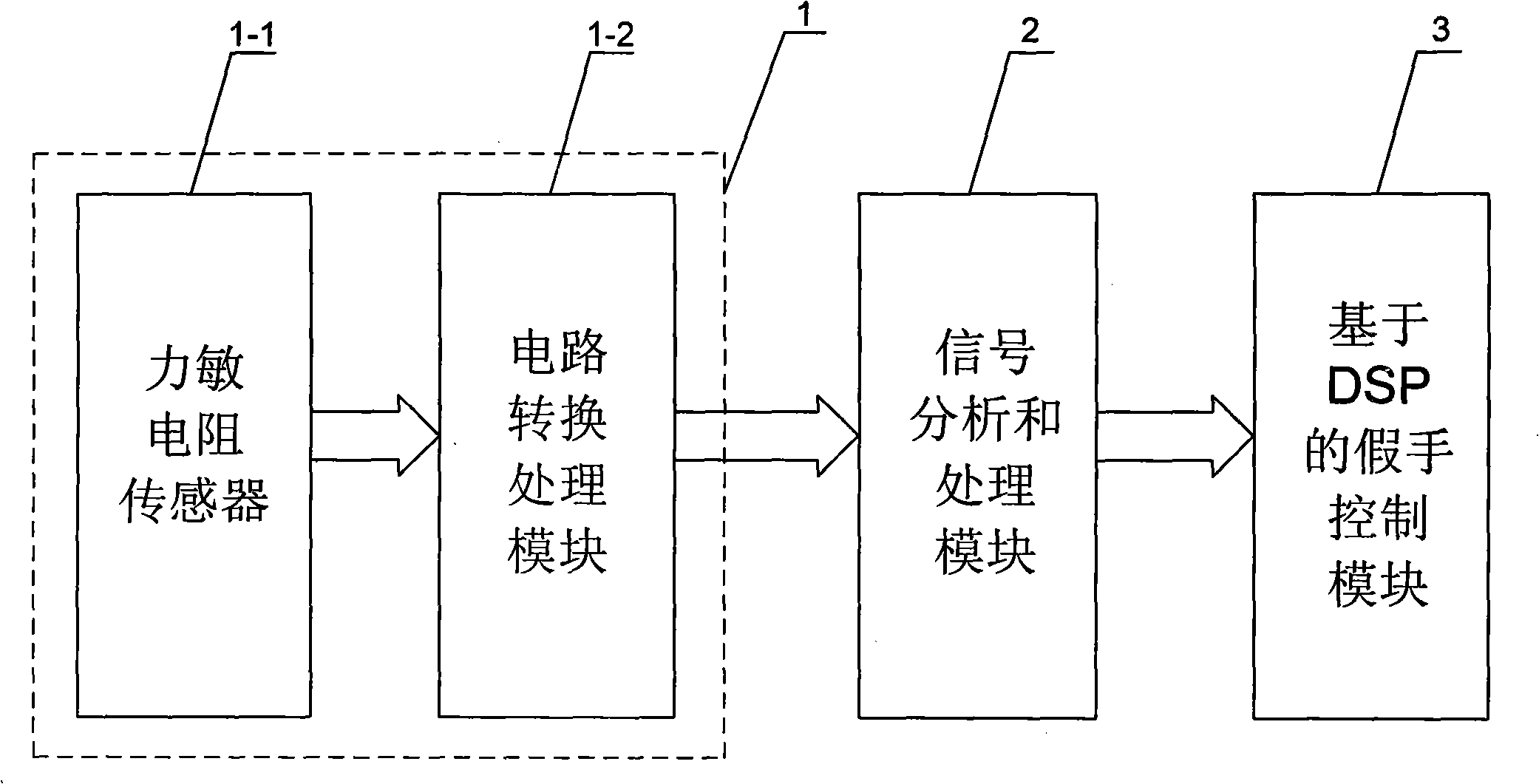
[0007] Specific implementation mode one: combine figure 1 Describe this embodiment, it is made up of information acquisition module 1, signal analysis and processing module 2 and the artificial hand control module 3 based on DSP; Described information acquisition module 1 is made up of force sensitive resistance sensor 1-1 and circuit conversion processing module 1-2 Composition: The force sensitive resistance sensor 1-1 is installed on the inside of the prosthetic tube that matches the shape of the forearm and is in full contact with the forearm muscles. The signal output end of the force sensitive resistance sensor 1-1 is connected to the signal input end of the circuit conversion processing module 1-2 connected; the signal output end of the circuit conversion processing module 1-2 is the signal output end of the information acquisition module 1, and the signal output end of the information acquisition module 1 is connected with the signal input end of the signal analysis and...
specific Embodiment approach 2
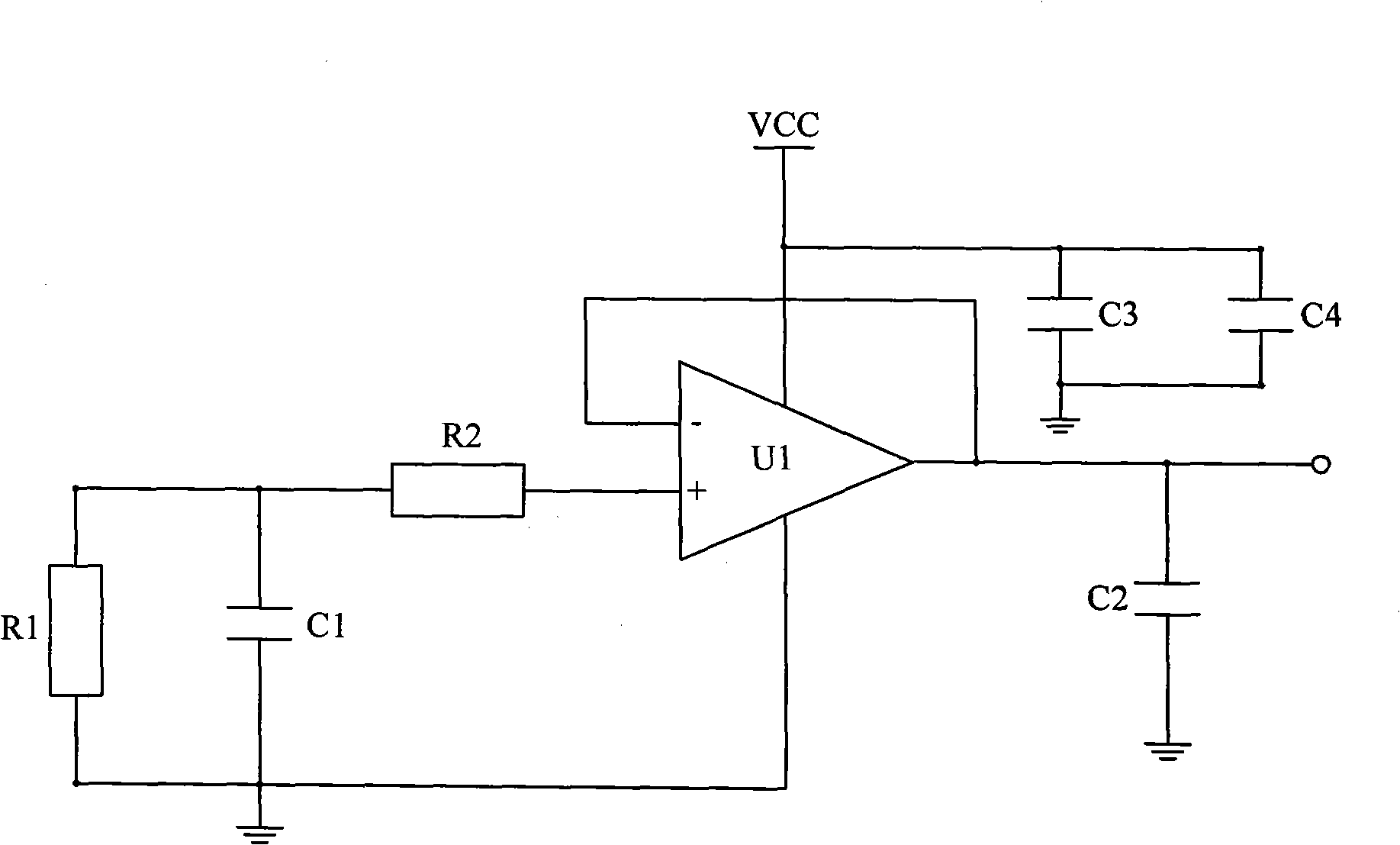
[0016] Specific implementation mode two: combination figure 2 Describe this embodiment. The difference between this embodiment and the specific embodiment is that the circuit conversion processing module 1-2 is composed of a first resistor R1, a second resistor R2, a first capacitor C1, a second capacitor C2, and a third capacitor Composed of C3, the fourth capacitor C4 and the amplifier U1; one end of the first resistor R1 is respectively connected to one end of the second resistor R2 and one end of the first capacitor C1; one end of the first resistor R1 is the circuit conversion processing module 1-2 Signal input terminal; the other end of the first resistor R1 is respectively connected to the other end of the first capacitor C1, the negative phase power input terminal of the amplifier U1 and the ground wire; the other end of the second resistor R2 is connected to the positive phase input terminal of the amplifier U1 The inverting input terminal of the amplifier U1 is conn...
specific Embodiment approach 3
[0017] Embodiment 3: The difference between this embodiment and Embodiment 1 is that the force sensitive resistance sensor 1 - 1 is a thick film polymer sensor. Other compositions and connection methods are the same as those in Embodiment 1. The force sensitive resistance sensor 1-1 has the characteristics of small size and high sensitivity. When the pressure acting on its surface increases, its resistance value will decrease correspondingly. The force-sensitive nature of the sensor is optimized for controlling electronic devices through the human sense of touch, making it ideal for acquisition of tactile signals.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More