

Mobile robot multi-behavior syncretizing automatic navigation method under unknown environment
A technology for mobile robots and unknown environments. It is applied in the field of robot navigation and intelligent control. It can solve the problems of lack of reliability and adaptive solutions, and achieve the goals of omitting the defuzzification process, optimizing navigation weight parameters, and improving adaptability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
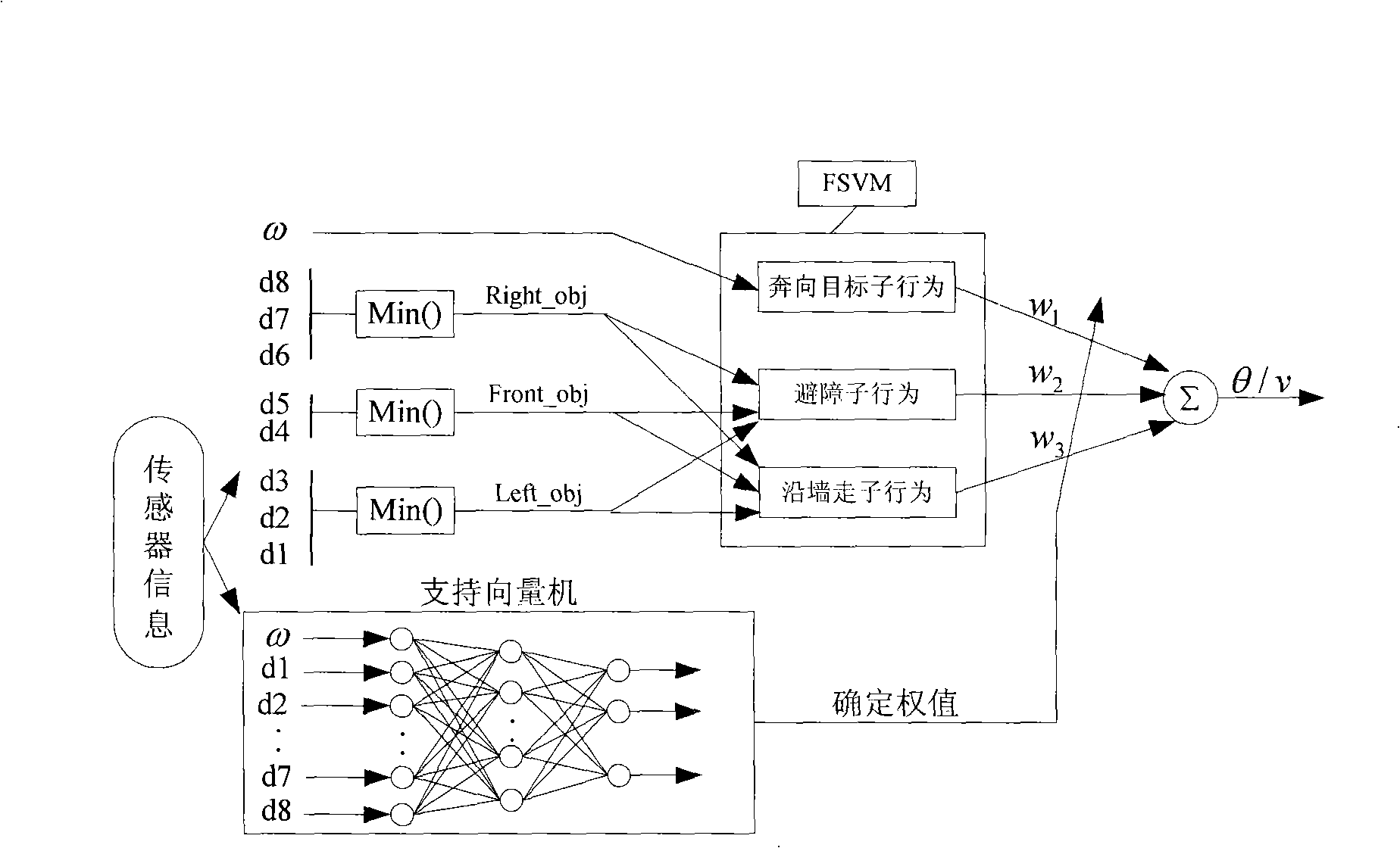
[0039] The system structure diagram of the present invention is as figure 1 as shown ( figure 1 FSVM is a fuzzy support vector machine), the input signal is azimuth and 8 distance parameters, and the navigation behavior is divided into three sub-behaviors: running to the target, walking along the wall, and avoiding obstacles. The information obtained by the sensor is sent to the sub-behavior controller and Environment recognition controller. The output of the sub-behavior controller is the robot's rotation angle θ and motion speed v, and the output of the environment identification controller is the matching degree between the sub-behavior and the current environment. The sum of the product of the output of the sub-behavior controller and the output of the corresponding environment recognition controller is the output of the entire navigation system, which controls the steering and speed of the mobile robot. The rotation angle θ and the motion velocity v are used to realize ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More