

Shuttle type rocker arm suspension mechanism of four-wheel probe vehicle
A rhombus-shaped four-wheel, probe car technology, applied in the direction of suspension, elastic suspension, extraterrestrial vehicles, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
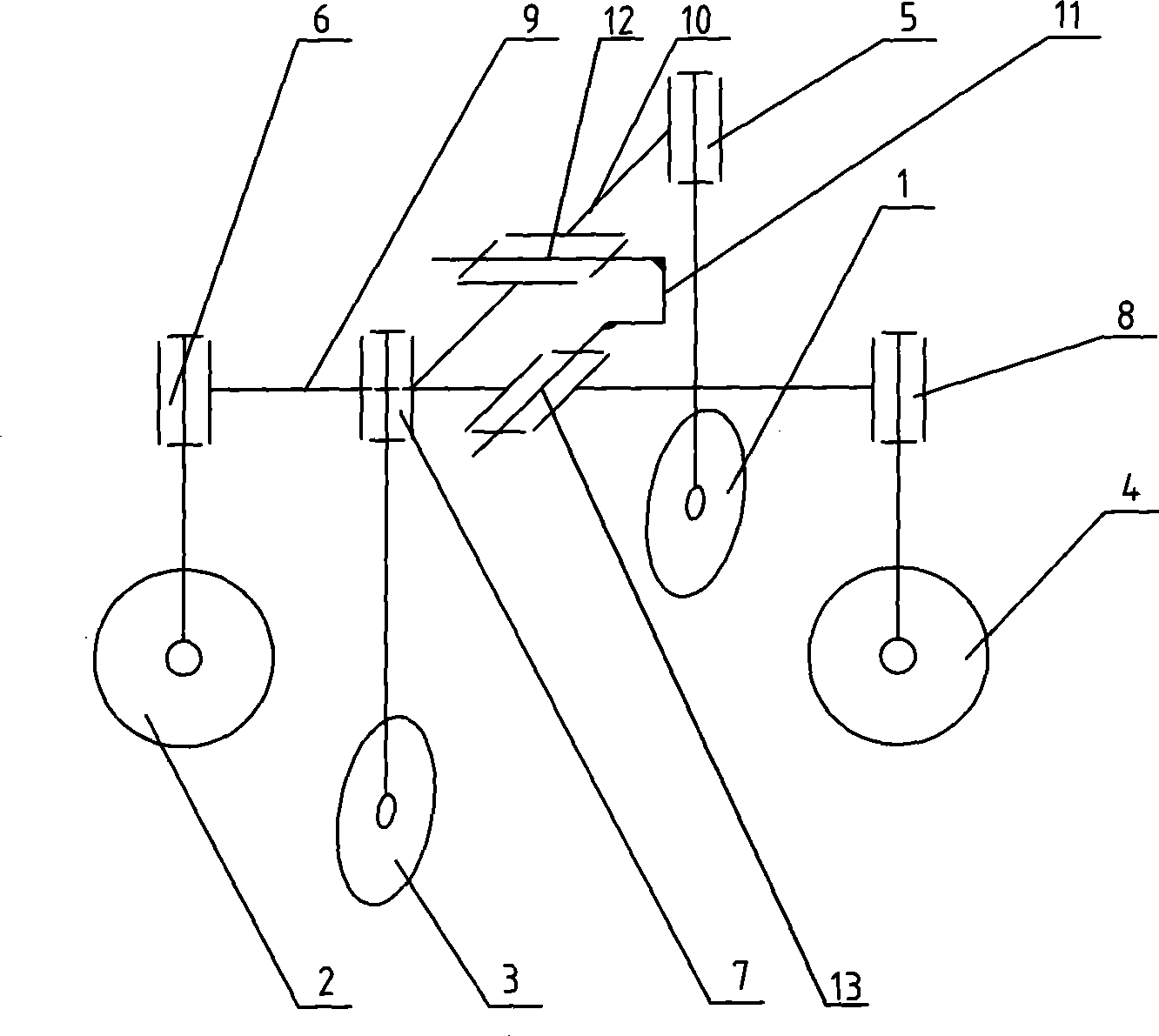
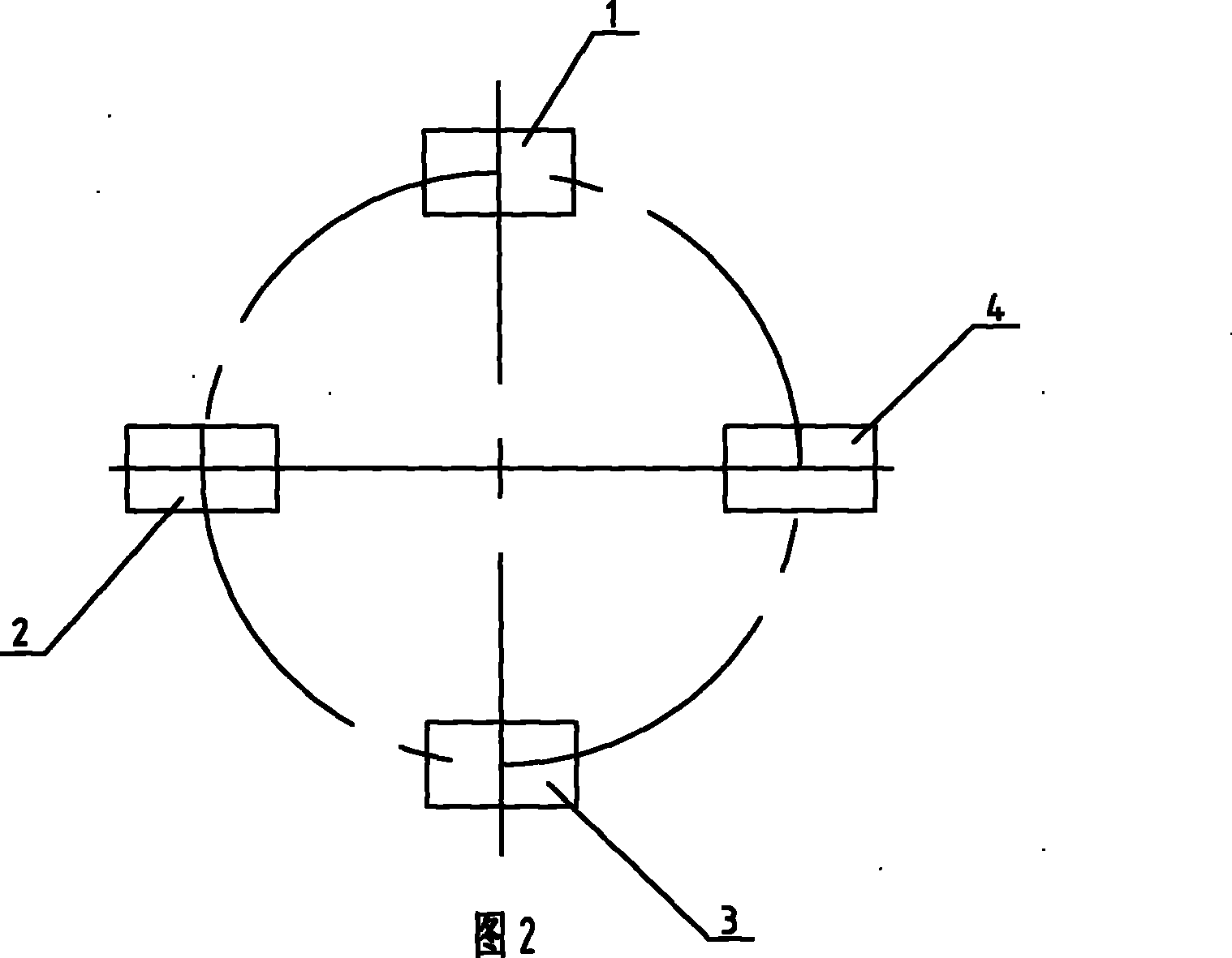
[0009] Specific implementation mode one: combine figure 1 and figure 2 Describe this embodiment, the suspension mechanism of this embodiment includes four wheels, four steering devices, cross bar 9, longitudinal bar 10 and chassis 11; The four wheels are arranged in a rhombus shape and are located on the four vertices of the rhombus, The four wheels are respectively the first wheel 1, the second wheel 2, the third wheel 3 and the fourth wheel 4, the first wheel 1 corresponds to the third wheel 3, and the second wheel 2 corresponds to the fourth wheel 4 , the four steering devices are respectively the first steering device 5, the second steering device 6, the third steering device 7 and the fourth steering device 8; Above, the two ends of the longitudinal rod 10 are fixedly connected to the first housing 5-4 of the first steering device 5 and the third housing 7-4 of the third steering device 7 respectively, and the first housing of the first steering device 5 The third con...
specific Embodiment approach 2
[0010] Specific implementation mode two: combination figure 1 To describe this embodiment, the hinge point 12 between the longitudinal bar 10 and the chassis 11 in this embodiment is located directly above the hinge point 13 between the cross bar 9 and the chassis 11 . With such arrangement, the body of the probe car has better balance. Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0011] Specific implementation mode three: combination figure 1 This embodiment will be described. In this embodiment, the center of each wheel is the same distance from the center of the four-wheel probe vehicle. With such a setting, the probe car has isotropy. Other compositions and connections are the same as those in Embodiment 1 or 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More