

Drill end actuator
A technology of end effector and optical axis, which is applied in the direction of drilling/drilling equipment, parts of boring machine/drilling machine, metal processing equipment, etc., and can solve problems such as difficulty in ensuring consistency in accuracy and quality, boring process, and heavy workload. , to achieve the effect of optimizing tool structure and cutting parameters, compact overall structure and good rigidity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described in detail below in conjunction with the accompanying drawings.
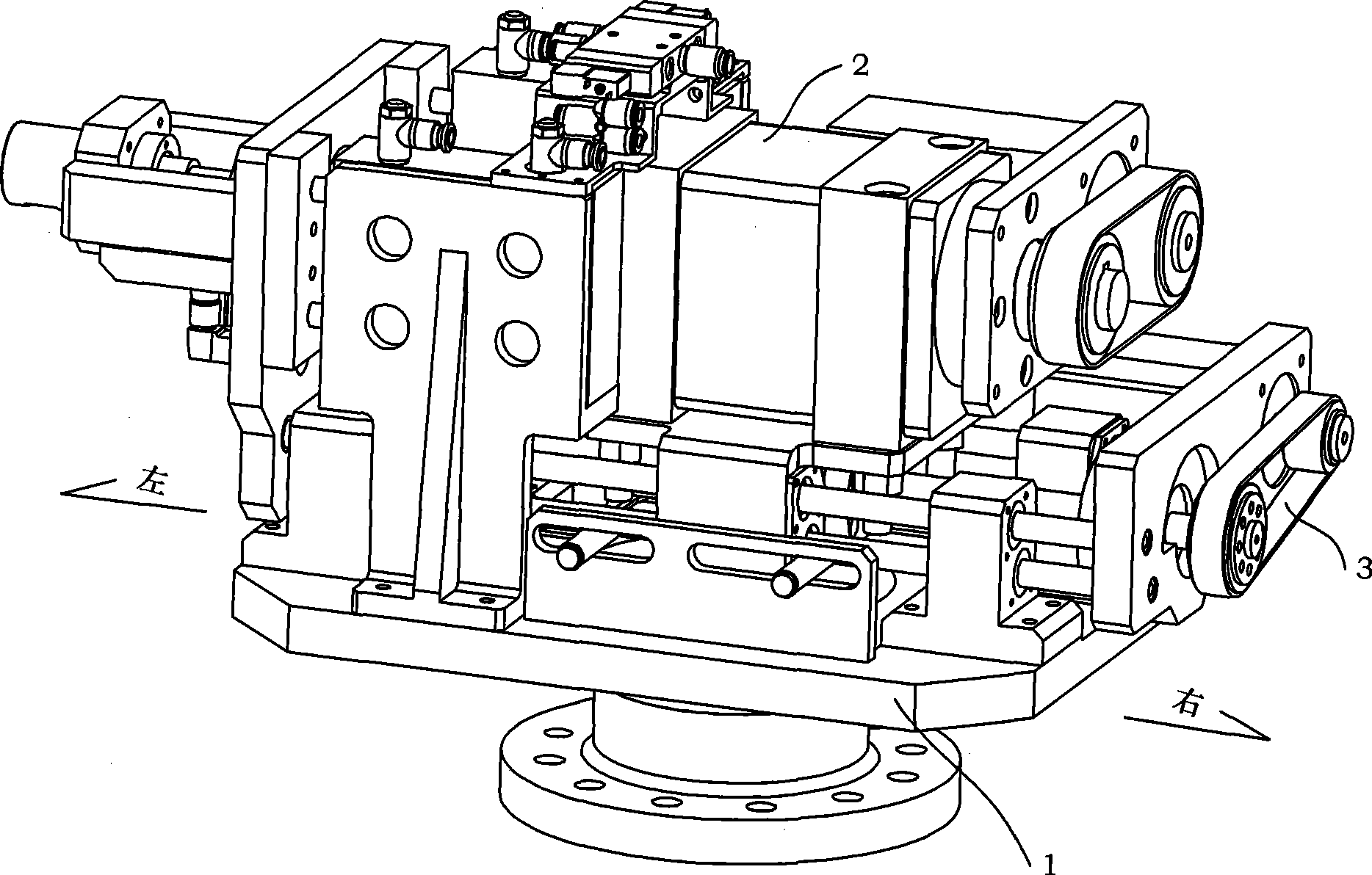
[0024] see figure 1 As shown, a drilling end effector for an industrial robot of the present invention includes a support unit 1, a spindle unit 2 and a feed unit 3; the rear plate 305 of the feed unit 3 is connected with The four optical axes (A optical axis 121 , B optical axis 122 , C optical axis 123 , and D optical axis 124 ) of the support unit 1 and the spindle unit 2 are installed on the spindle head support 102 of the support unit 1 .
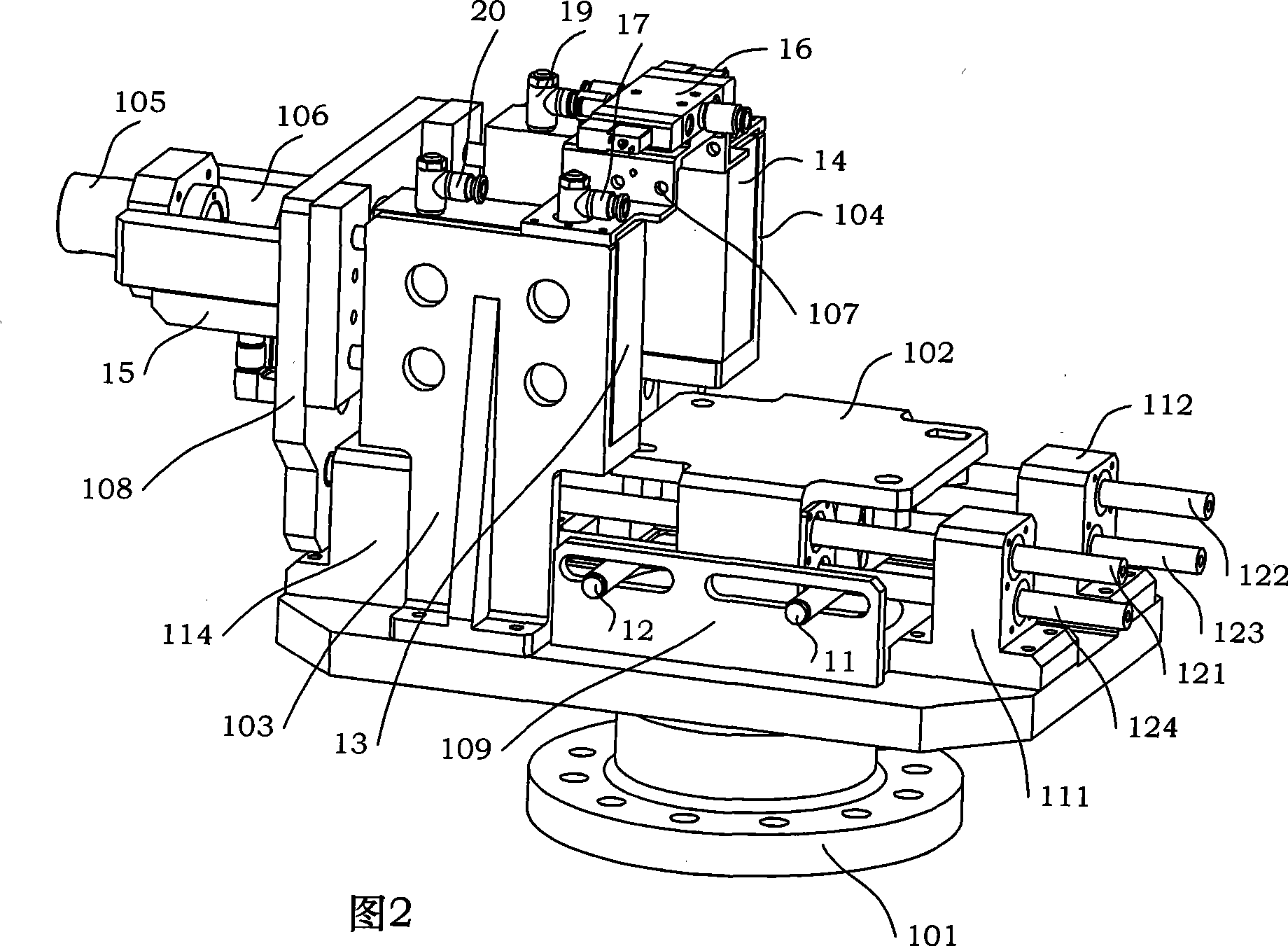
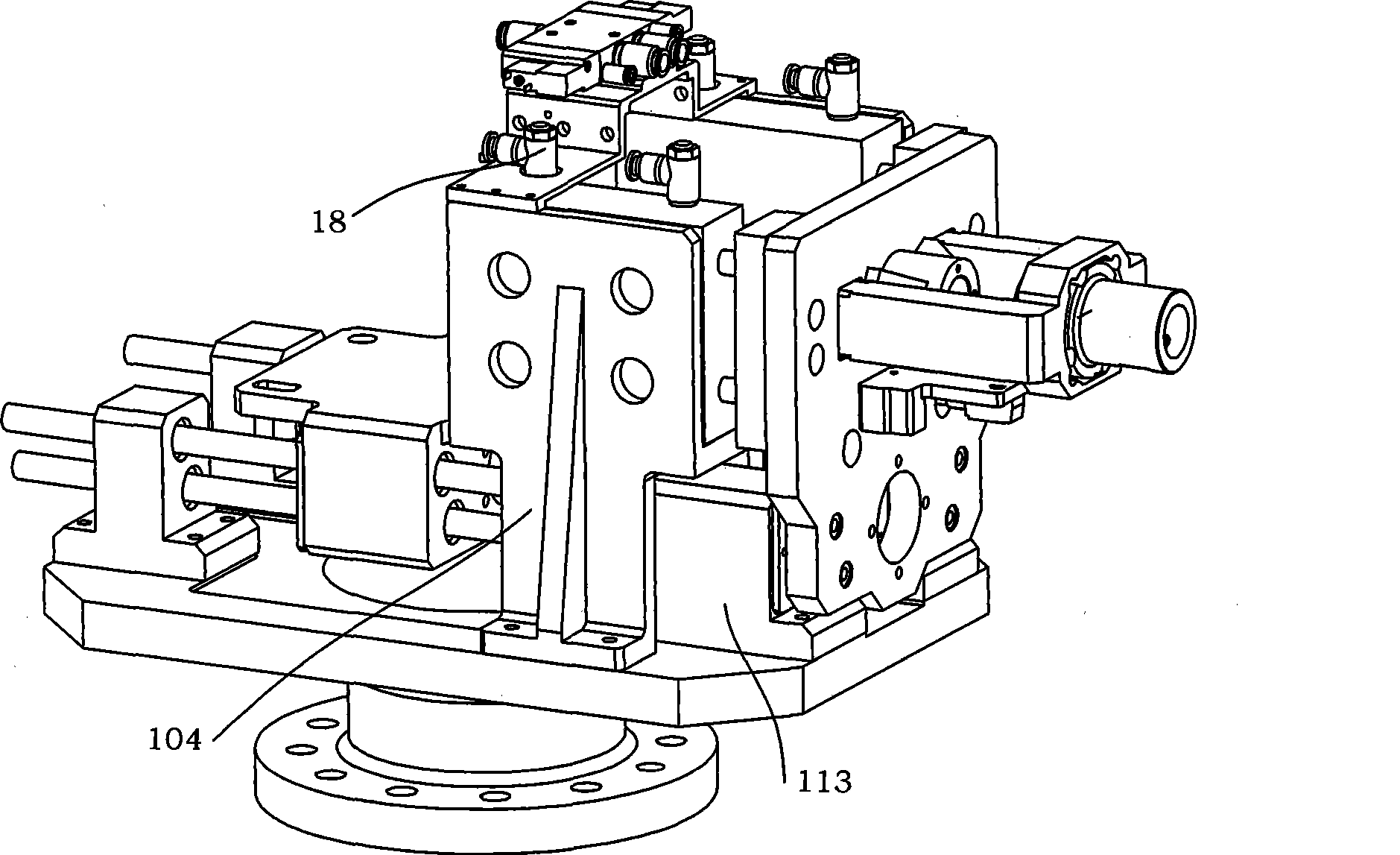
[0025] See Figure 2, Figure 2A , as shown in Figure 2B, the support unit 1 includes a base 101, four shaft seats (A shaft seat 111, B shaft seat 112, C shaft seat 113, D shaft seat 114), four optical axes (A optical axis 121 , B optical axis 122, C optical axis 123, D optical axis 124), two cylinder supports (A cylinder support 103, B cylinder support 104), spindle head support 102, A connecting plate 107, front pl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More