

Method for implementing low power consumption suspension of five-freedom degree magnetic suspension system axial magnetic bearing
An axial magnetic bearing and magnetic suspension technology, applied in the direction of shaft and bearing, bearing, mechanical equipment, etc., can solve the problem of excessive displacement deviation error signal, and achieve the effect of low power consumption and easy realization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
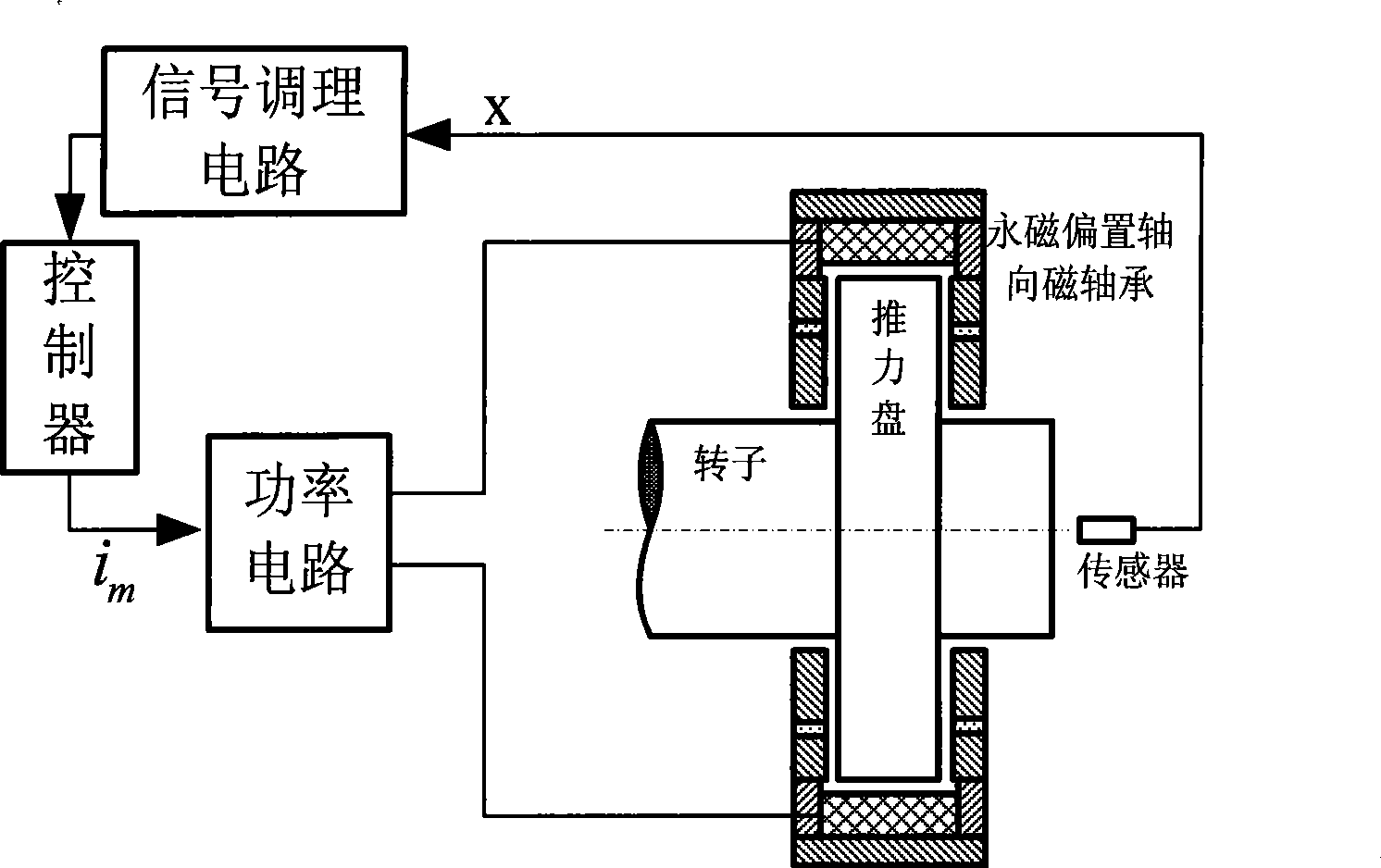
[0022] Permanent magnet bias axial magnetic bearing control coil control circuit part such as figure 1 As shown, including signal conditioning circuit, power circuit and controller. The signal conditioning circuit converts the axial displacement signal of the rotor into a voltage signal that the controller can receive. The power circuit supplies current to the axial control coil of the permanent magnet bias axial magnetic bearing. The controller receives the axial position signal and uses The low-power displacement compensation algorithm generates corresponding control signals to control the power circuit.
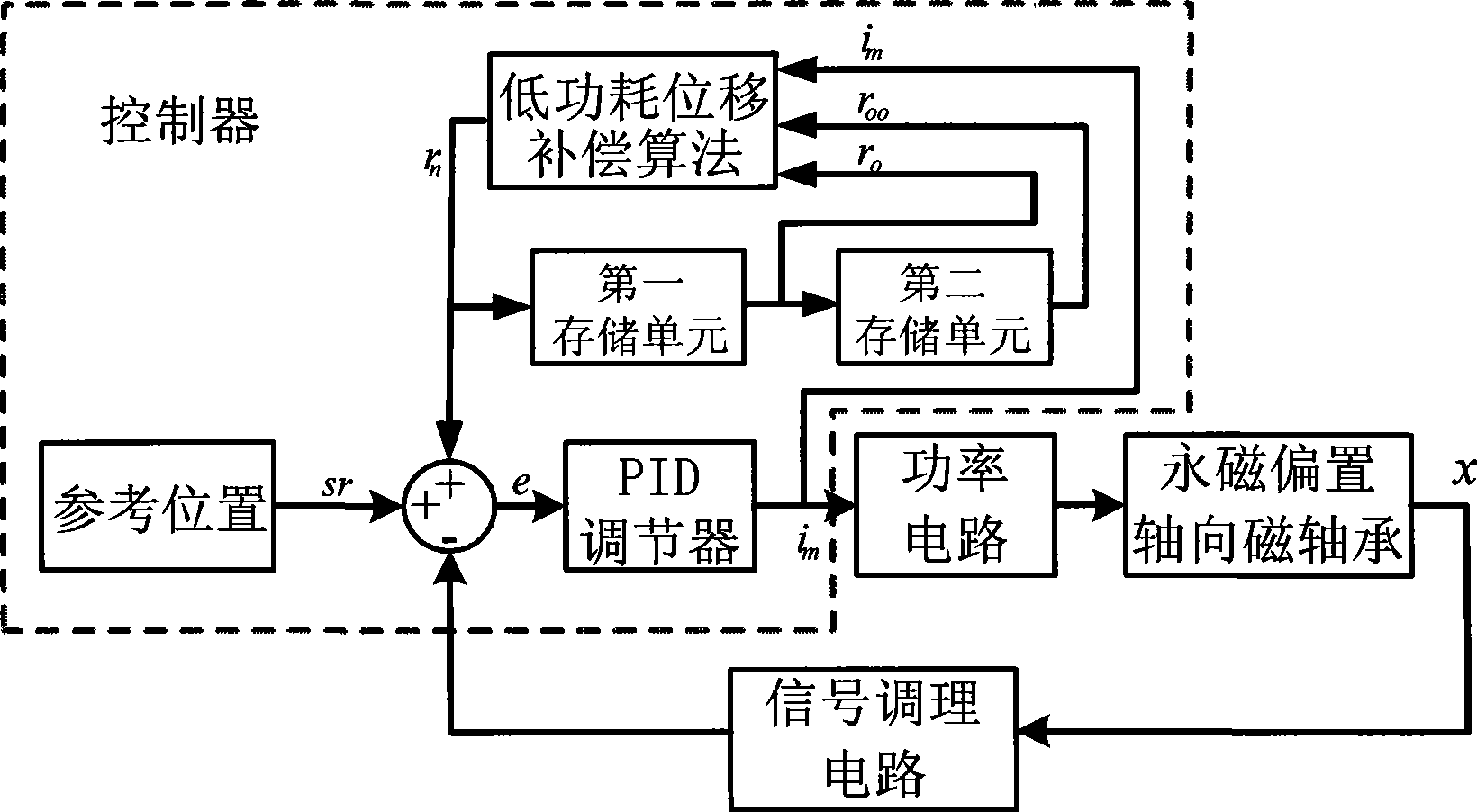
[0023] The permanent magnet bias axial magnetic bearing control coil realizes axial low power consumption levitation. The realization method is as follows: figure 2 As shown, the low-power magnetic bearing axial degree of freedom negative feedback closed-loop control system includes the suspension position of the given rotor in the controller, that is, the reference posi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More