

Front-handling crane/forklift positioning control system with positioning controller
A technology for controllers and stackers, applied in positioning, radio wave measurement systems, instruments, etc., can solve problems such as error accumulation, inaccurate positioning and navigation, and accumulation of positioning and navigation errors, so as to reduce the rate of wrong boxes and facilitate job scheduling , Prevent the effect of wrong box
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
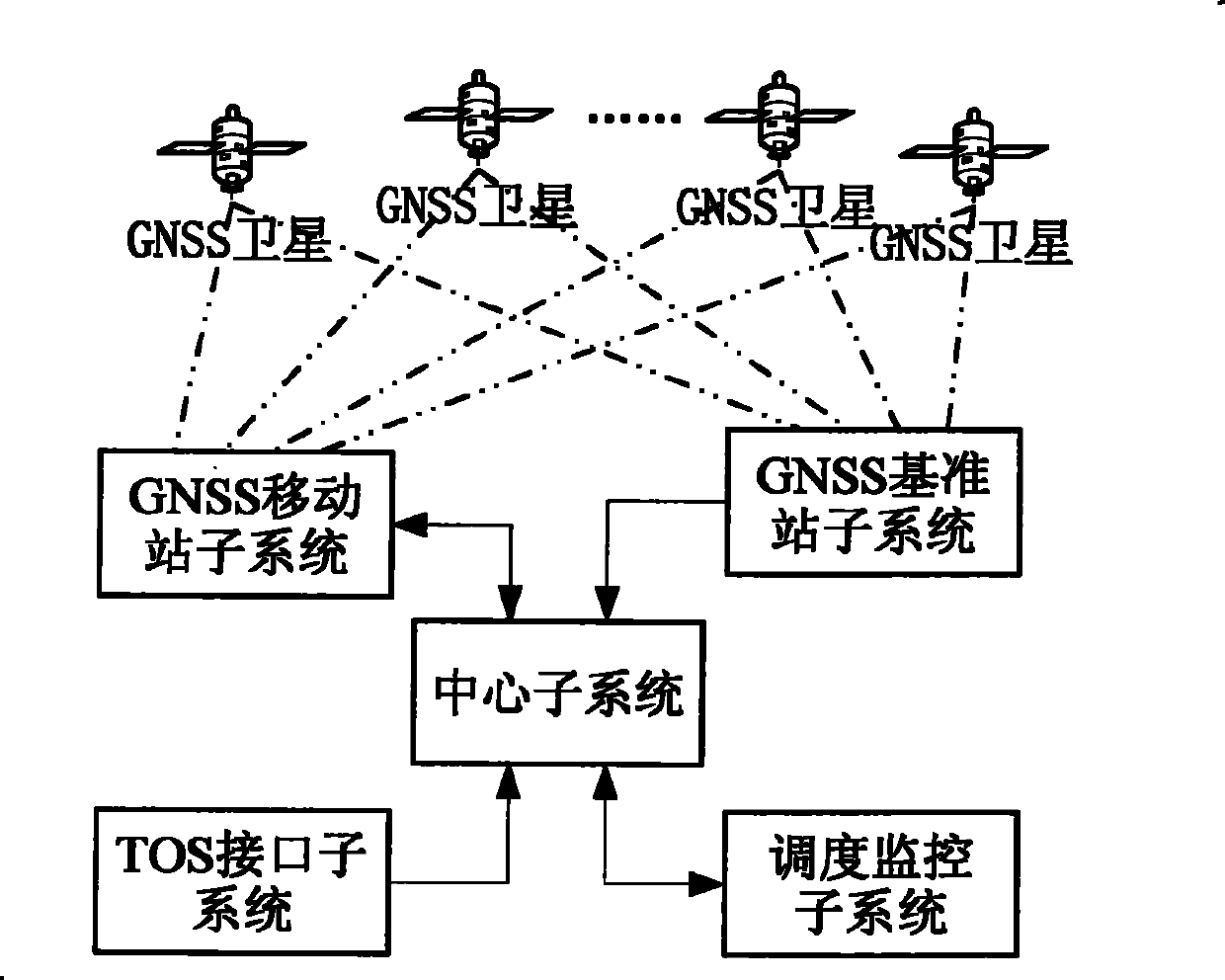
[0046] Embodiment 1, a positioning control system for a reach stacker / forklift with a positioning controller, the whole system can rely on the existing vehicle-mounted wireless terminal, wireless network, computer network system, terminal operating system (TOS) and other frameworks in the port, Such as figure 1 As shown, at least the following subsystems are included: GNSS reference station subsystem, several GNSS mobile station subsystems and TOS interface subsystem.
[0047] in:
[0048] The GNSS reference station subsystem is used to generate and broadcast GNSS differential correction numbers; the broadcast mode of GNSS differential correction numbers can be TCP, UDP broadcast, or other methods, such as broadcasting by digital radio stations or Internet radio stations.
[0049] The TOS interface subsystem is used to provide container distribution information and operation instruction information.
[0050] The GNSS mobile station subsystem can have one or more, each corr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More