

Micro-nano working platform of three-dimensional mobile orthogonal structure
A three-dimensional moving, operating table technology, applied in the field of robots, can solve the problems of asymmetric structure, complex structure, difficult displacement decoupling, etc., and achieve the effects of low manufacturing cost, large bearing capacity, and displacement decoupling.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: the present embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and processes are provided, but the protection scope of the present invention is not limited to the following implementations example.
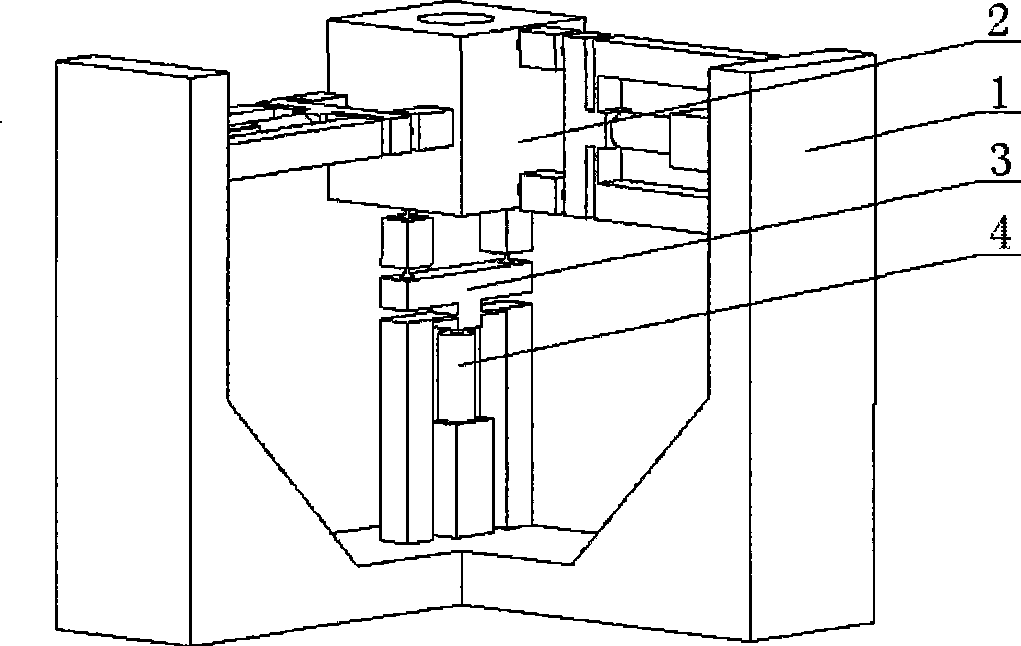
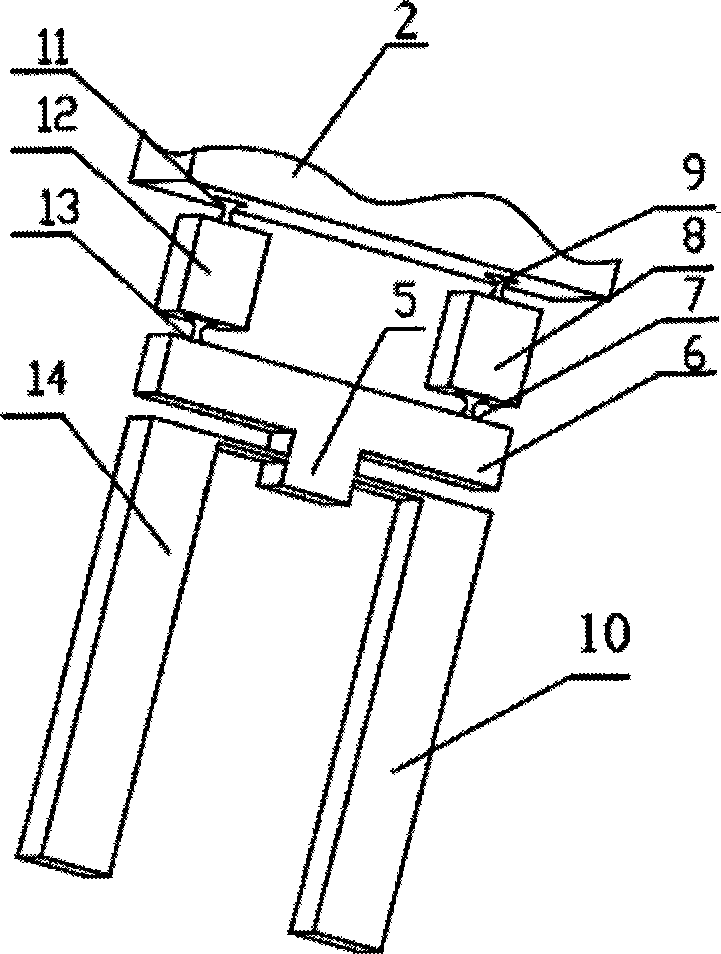
[0014] like figure 1 As shown, it is an embodiment of the present invention. This three-dimensional mobile orthogonal structure micro-nano operation platform, the body is a non-assembled part that is processed and formed at one time, and consists of a base 1, a workbench 2, and three P-4S branch chains 3 (See figure 2 ) and three piezoceramic drivers 4. The base 1 and the workbench 2 are connected by three P-4S branch chains 3 composed of flexible hinges. These three P-4S branch chains 3 are respectively arranged along three mutually perpendicular directions, and the axis of eac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More