Foot plate structure of humanoid robot capable of perceiving ground counterforces
A humanoid robot and foot plate technology, applied in the field of humanoid robots, can solve the problems of inability to control the adaptability of the robot, no computing robot, and inability to communicate, so as to increase the ability to adapt to the ground environment, reduce the volume and weight, and protect the power The effect of the sensor
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
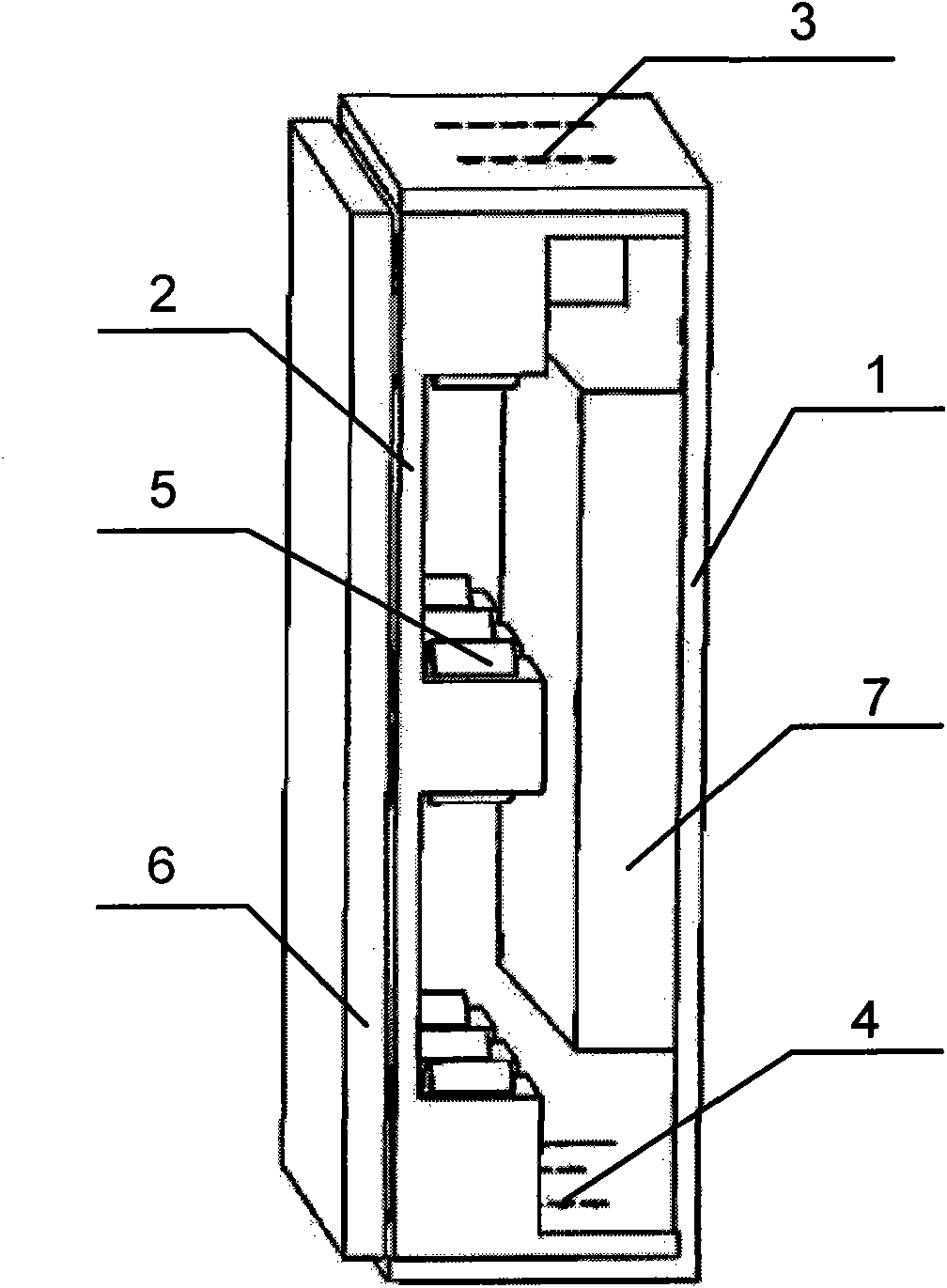
[0032] like Figure 1-7 As shown, a footboard structure of a humanoid robot capable of sensing ground reaction force is composed of two footboards, each footboard mainly includes an upper board 1, a lower board 2, a force sensor 5, a rectangular rubber pad 6, a circuit board 7, Rubber guide blocks 10.
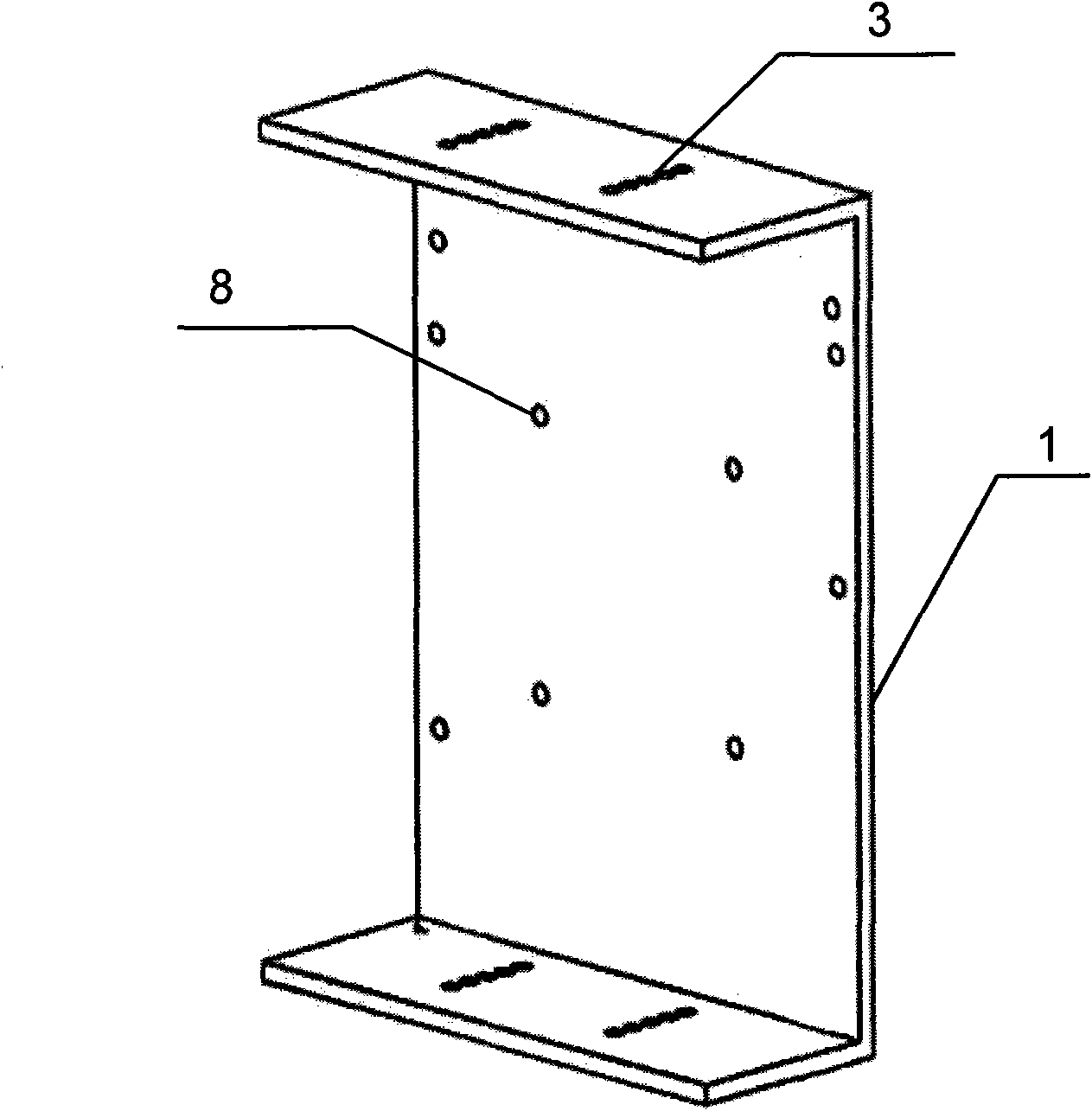
[0033] The upper plate 1 is a rectangular plate with side plates at both ends, and its material is light aluminum alloy with a thickness of 3mm. Adjustment holes 3 for adjusting the height of the feet are respectively provided on the side plates at both ends. The upper board 1 is fixedly connected with the lower board 2 through the adjustment holes 3 and screws. There are screw holes 8 on the surface of the upper board 1. Through the screw holes 8 And screws are fixedly connected with the circuit board 7 below the upper deck 1 and the ankle above the upper deck respectively.
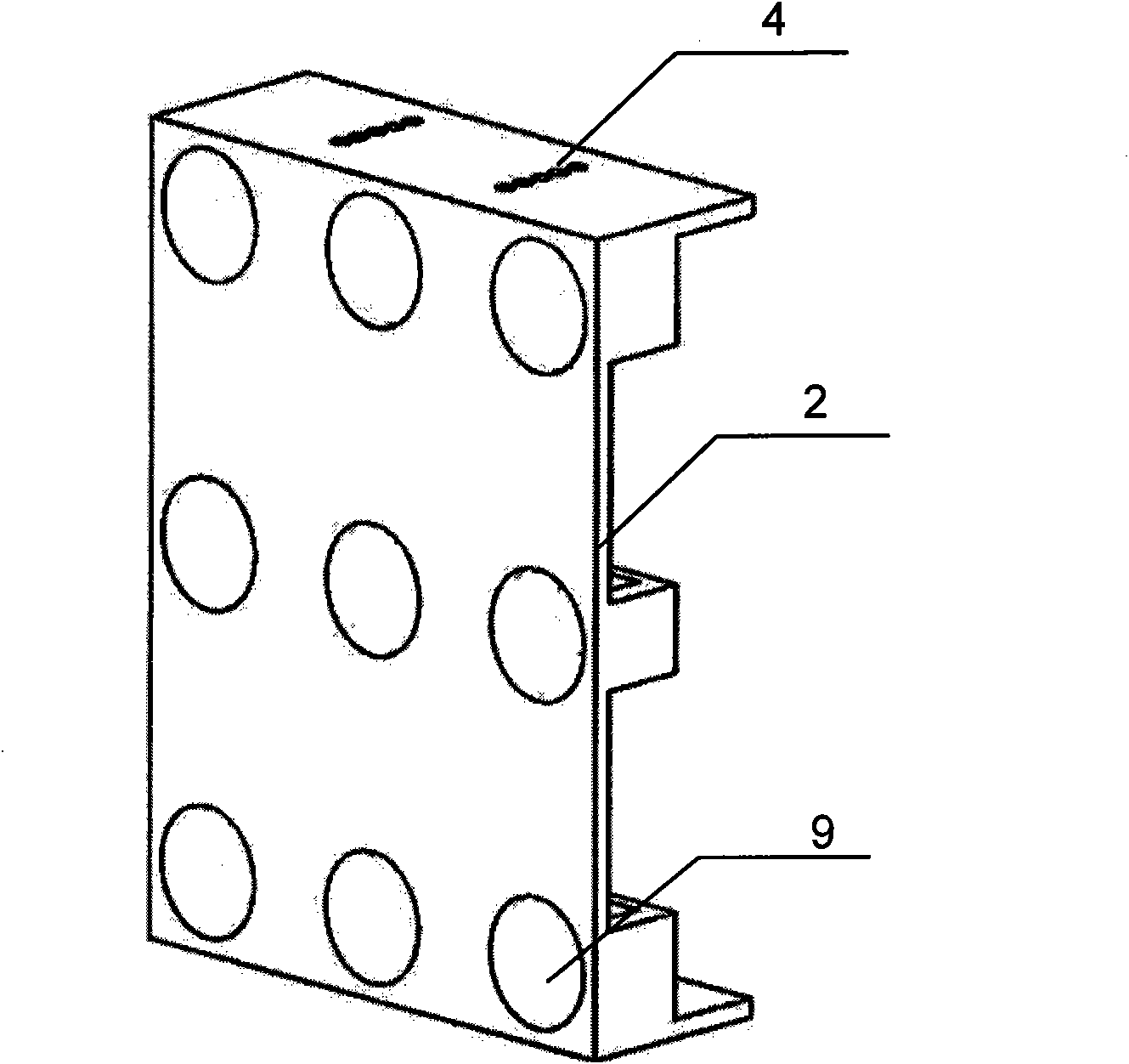
[0034] The lower plate 2 is a rectangular plate with side plates at both ends, and its material is l...
Embodiment 2
[0067] A foot plate structure of a humanoid robot capable of sensing ground reaction force, the same as embodiment 1, is characterized in that: force sensor 5 is nine model FC23 common commercially available force sensors, the thickness of upper plate 1 is 2mm, and the thickness of lower plate 2 The thickness of the rubber guide block 10 is 6mm, the thickness of the rectangular rubber pad 6 is 1mm, and the used operational amplifier of the small signal amplification filter circuit of the circuit board 7 is a commercially available common operational amplifier AD620.
Embodiment 3
[0069] A foot plate structure of a humanoid robot capable of sensing ground reaction force, the same as embodiment 1, is characterized in that force sensor 5 is nine model NS-TH13 common commercial force sensors, the thickness of the upper plate 1 is 5mm, the lower plate The thickness of plate 2 is 5mm, and the thickness of rubber guide block 10 is 9mm, and the thickness of rectangular rubber pad 6 is 3mm, and the used operational amplifier of the small signal amplifying filter circuit of circuit board 7 is the commercially available common operational amplifier OP07.
PUM
| Property | Measurement | Unit |
|---|---|---|
| Thickness | aaaaa | aaaaa |
| Thickness | aaaaa | aaaaa |
| Thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com