

Method for calibrating three-dimensional micro-touch force sensor
A technology of force sensor and calibration method, applied in the direction of instrument, force/torque/work measuring instrument calibration/test, measurement device, etc. Improve accuracy, reduce calibration error, and reduce the effect of step size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The calibration method of the three-dimensional micro-tactile force sensor of the present invention will be described in detail below in conjunction with the accompanying drawings of the embodiments.
[0036] The calibration method of the three-dimensional micro-tactile force sensor of the present invention comprises the following steps:
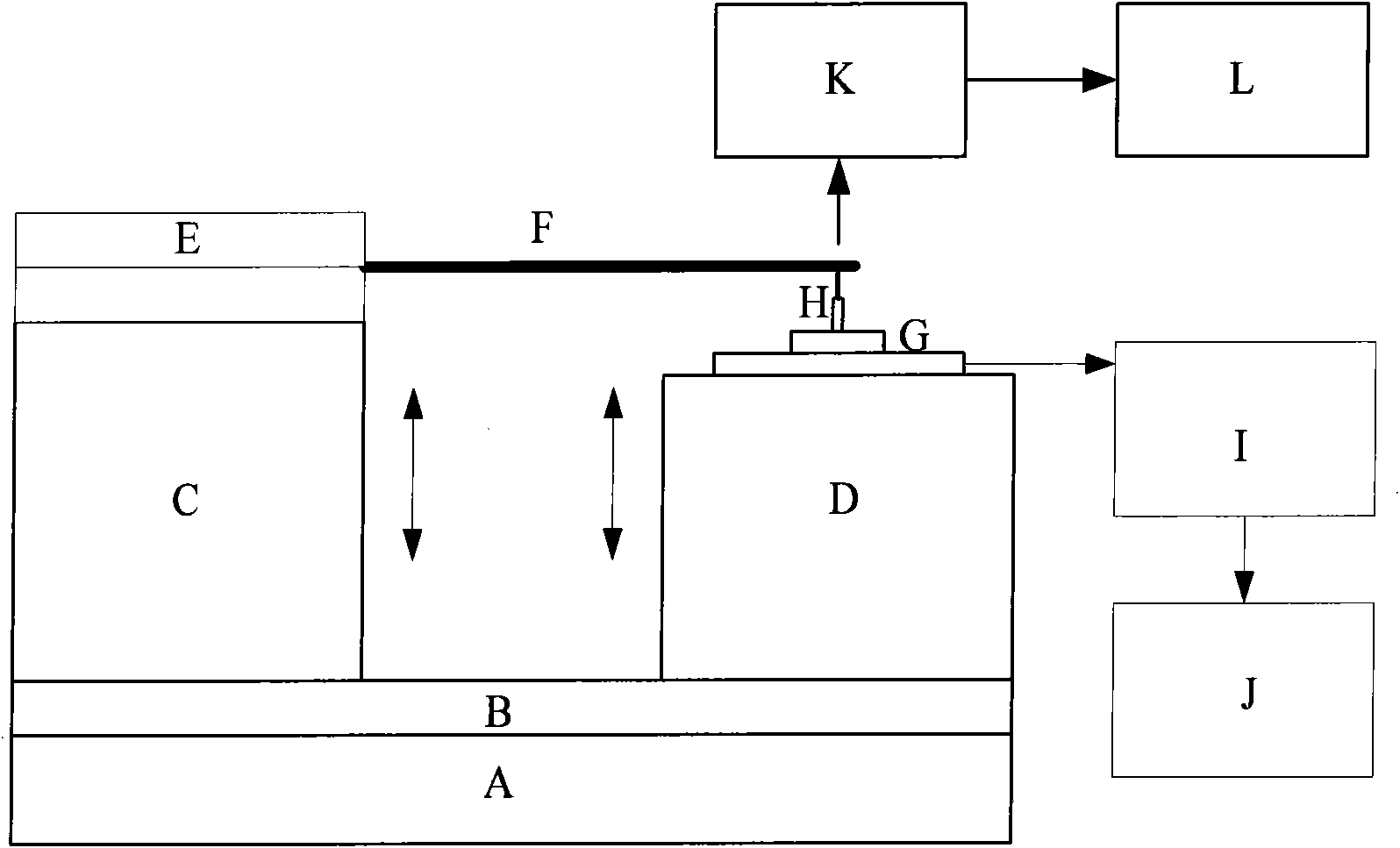
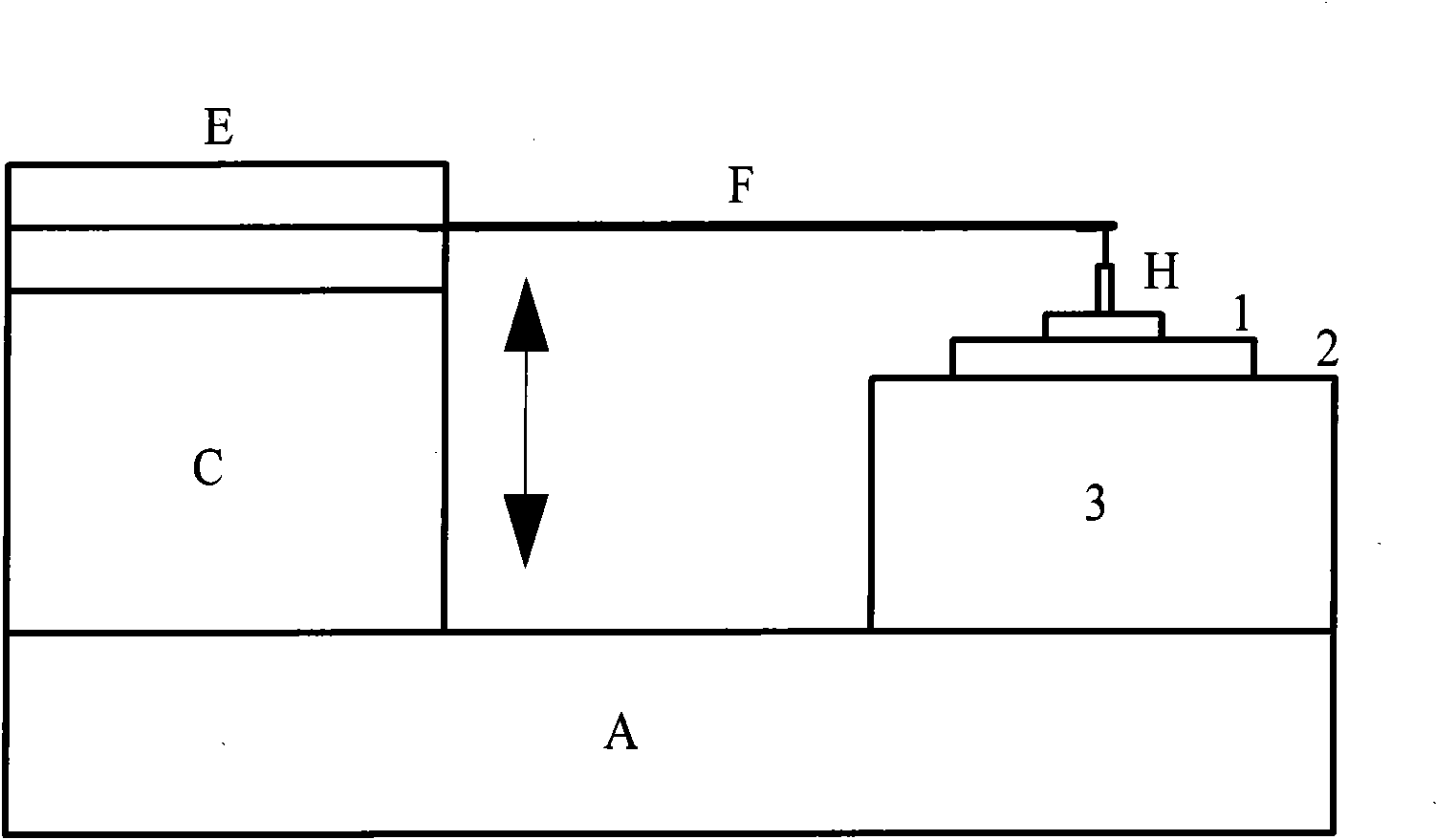
[0037] (1) Using the principle of cantilever beam bending deformation to obtain the small force signal required for the calibration of the three-dimensional micro-tactile force sensor;
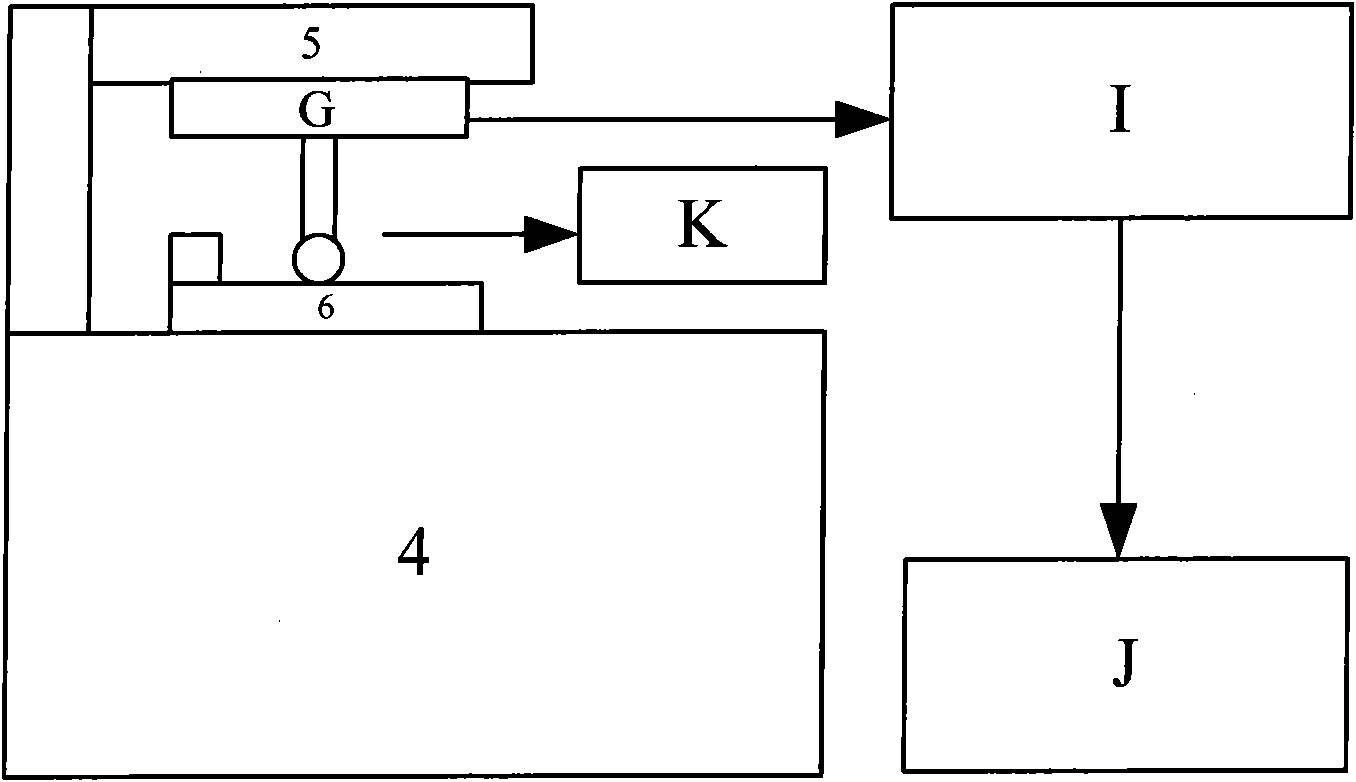
[0038] (2) Measure the elastic coefficient of the cantilever beam;
[0039] The measurement of the elastic coefficient of the cantilever beam is realized by making the free end of the cantilever beam deflect through the micro-movement platform, and then measuring the magnitude of the force applied to the balance by the free end of the cantilever beam. Specifically, build as figure 2 In the cantilever beam elastic coefficient calibration system show...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More