

Method for navigating and positioning multi-joint arm mechanical sensing type ultrasonic image
An ultrasonic imaging, navigation and positioning technology, applied in surgical navigation systems, medical science, measuring devices, etc., can solve problems such as clumsiness and limited working range, and achieve the effects of good flexibility, good real-time performance, and convenient clinical operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
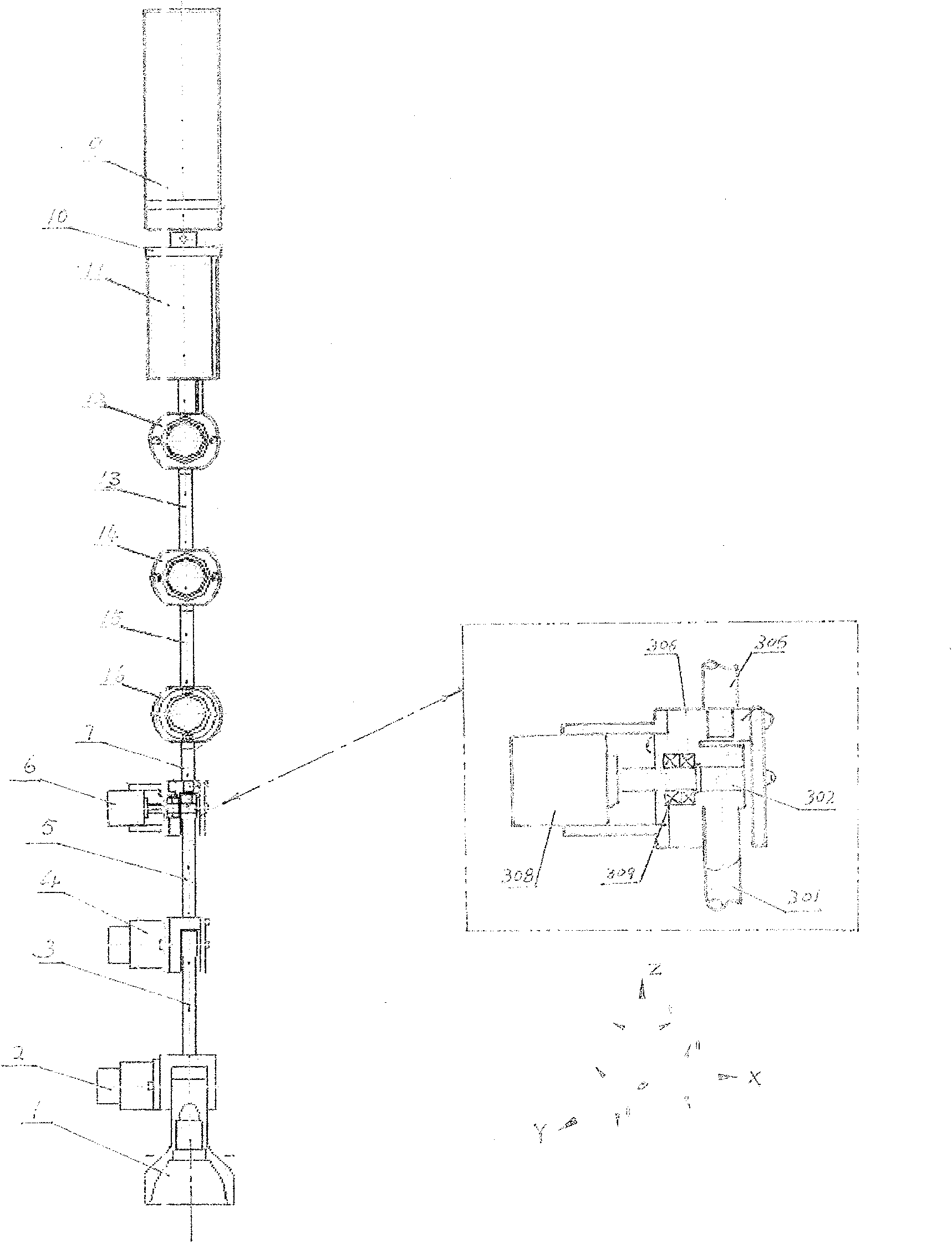
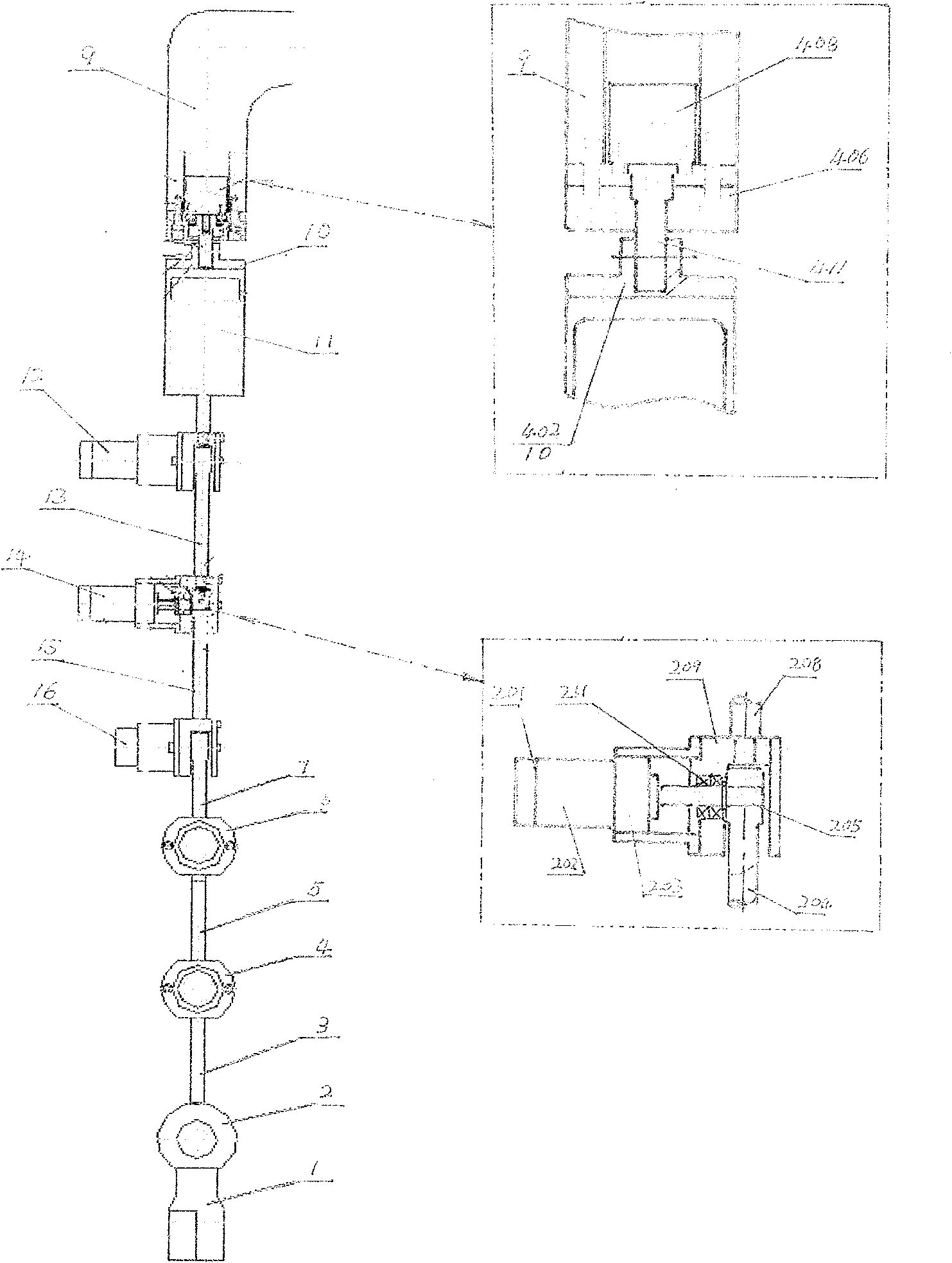
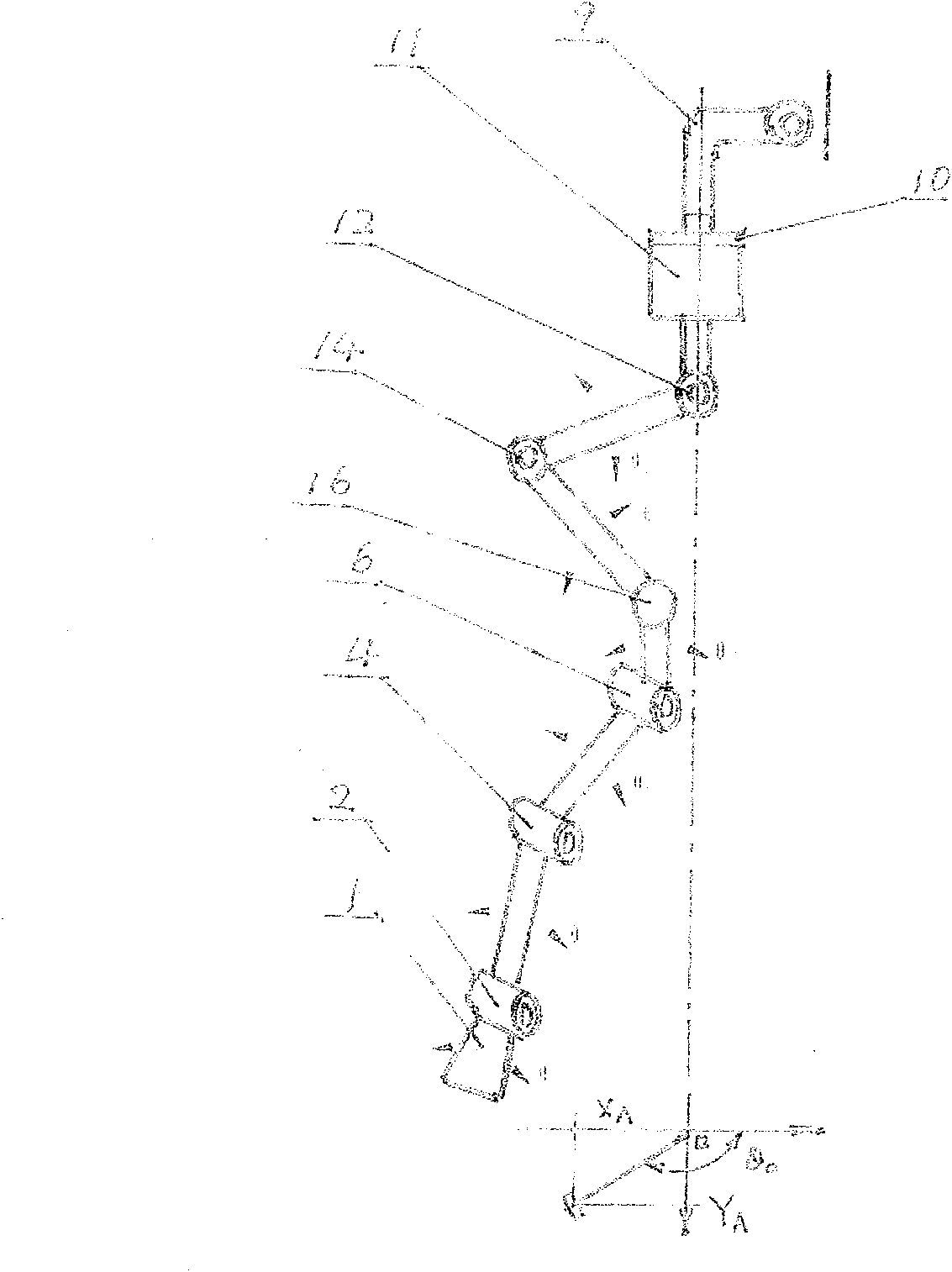
[0023] Depend on Figure 1A , Figure 1B , figure 2 and image 3 It shows a six-joint mechanical arm with sensors, which is mainly composed of 2 electric joints with optical code discs, 4 passive joints with angle sensors and a suspended turntable, in which: the suspended turntable 10 The elbow 9 is connected upward, and the two-dimensional displacement sensor 11 is connected downward. The lower end of the two-dimensional displacement sensor 11 is directly connected to the first electric joint 12, and is connected to the second electric joint 14 through the first swing rod 13, The second electric joint 14 is connected to the second pendulum 15, the first passive joint 16, the third pendulum 7, the second passive joint 6, the fourth pendulum 5, and the third pendulum. The passive joint 4, the fifth pendulum 3, the fourth passive joint 2 until the ultrasonic probe seat 1 at the end of the navigation arm.
[0024] The suspended turntable 10 of the present invention makes the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More