

Quantitative sampling robot suitable for multiple environments
A robot and sampler technology, applied in the field of robotics, can solve problems such as large randomness, inaccurate sampling results, and inability to collect samples
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
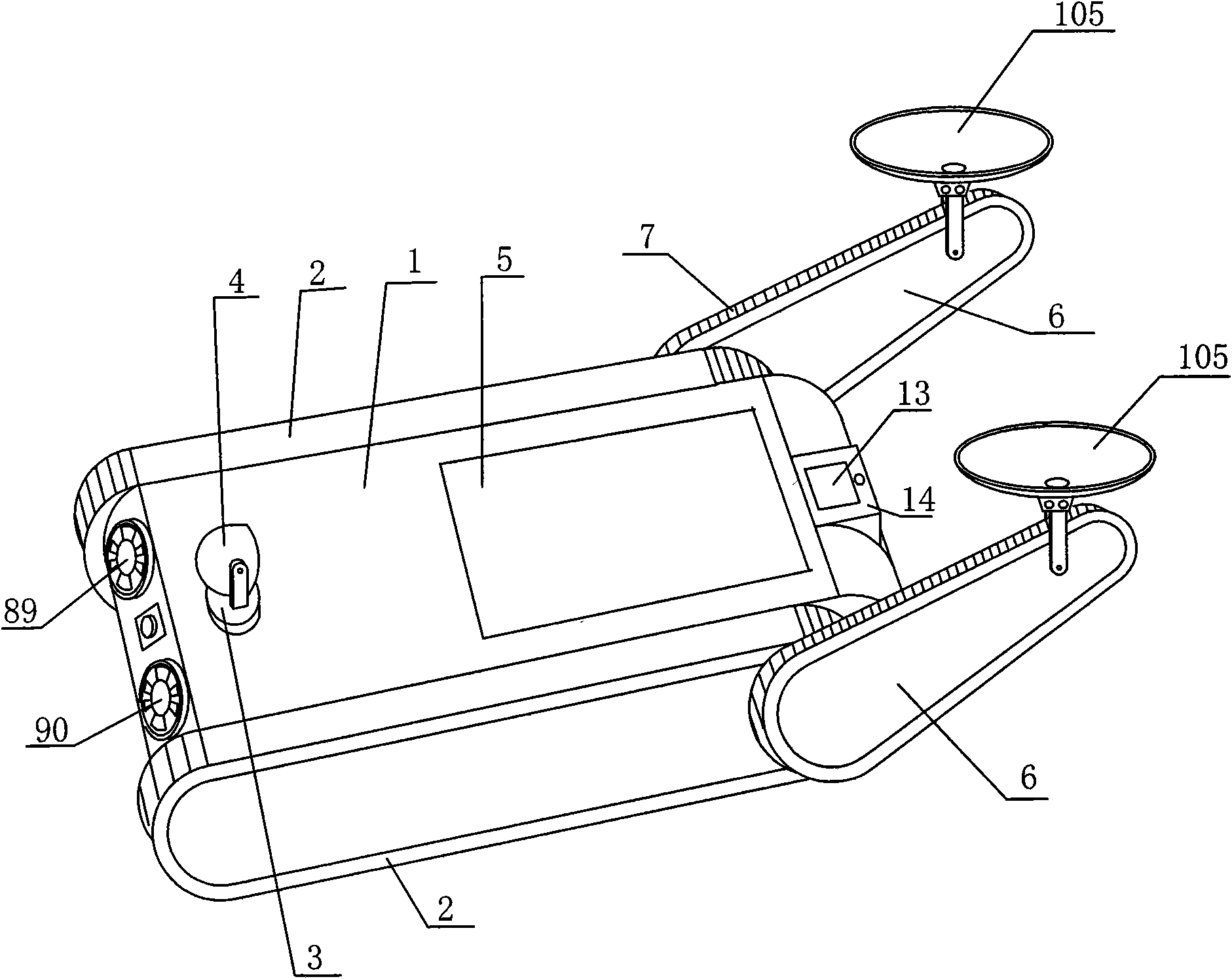
[0119] see figure 1 , the quantitative sampling robot applicable to various environments includes a car body 1 with walking crawlers 2 on both sides, and a base 3 that can rotate around a horizontal axis on the rear top surface of the car body 1. Observation cover 4, described observation cover 4 is equipped with optical camera and illuminating lamp; Described car body is provided with ground dust quantitative sampler 5, and its structural characteristics are:
[0120] The observation cover 4 is also equipped with an infrared thermal imager camera, and the car body 1 or the observation cover 4 is also equipped with a temperature sensor, a humidity sensor, a sound sensor, a vibration sensor, an inflammable, explosive and toxic gas sensor, and an air pressure sensor;
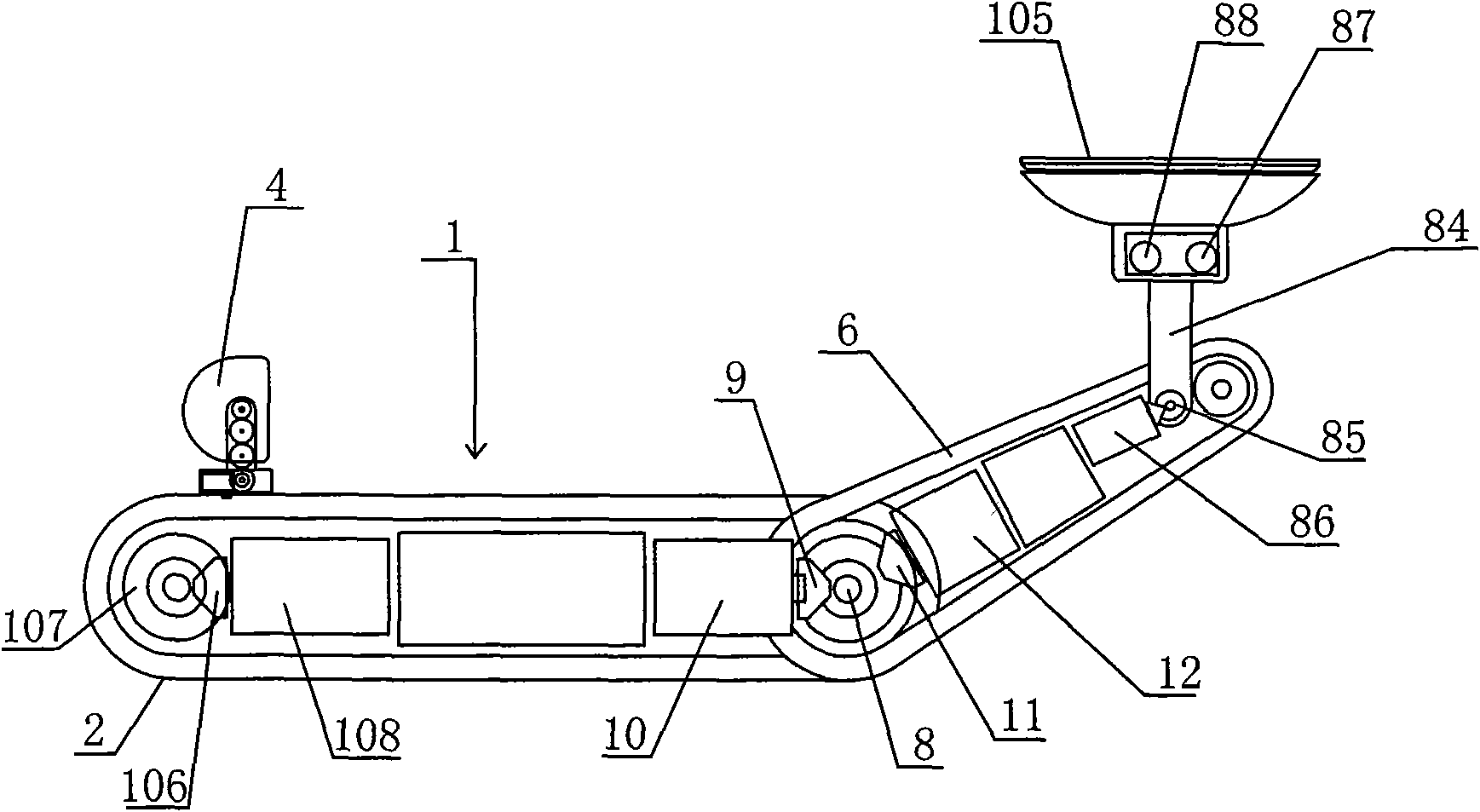
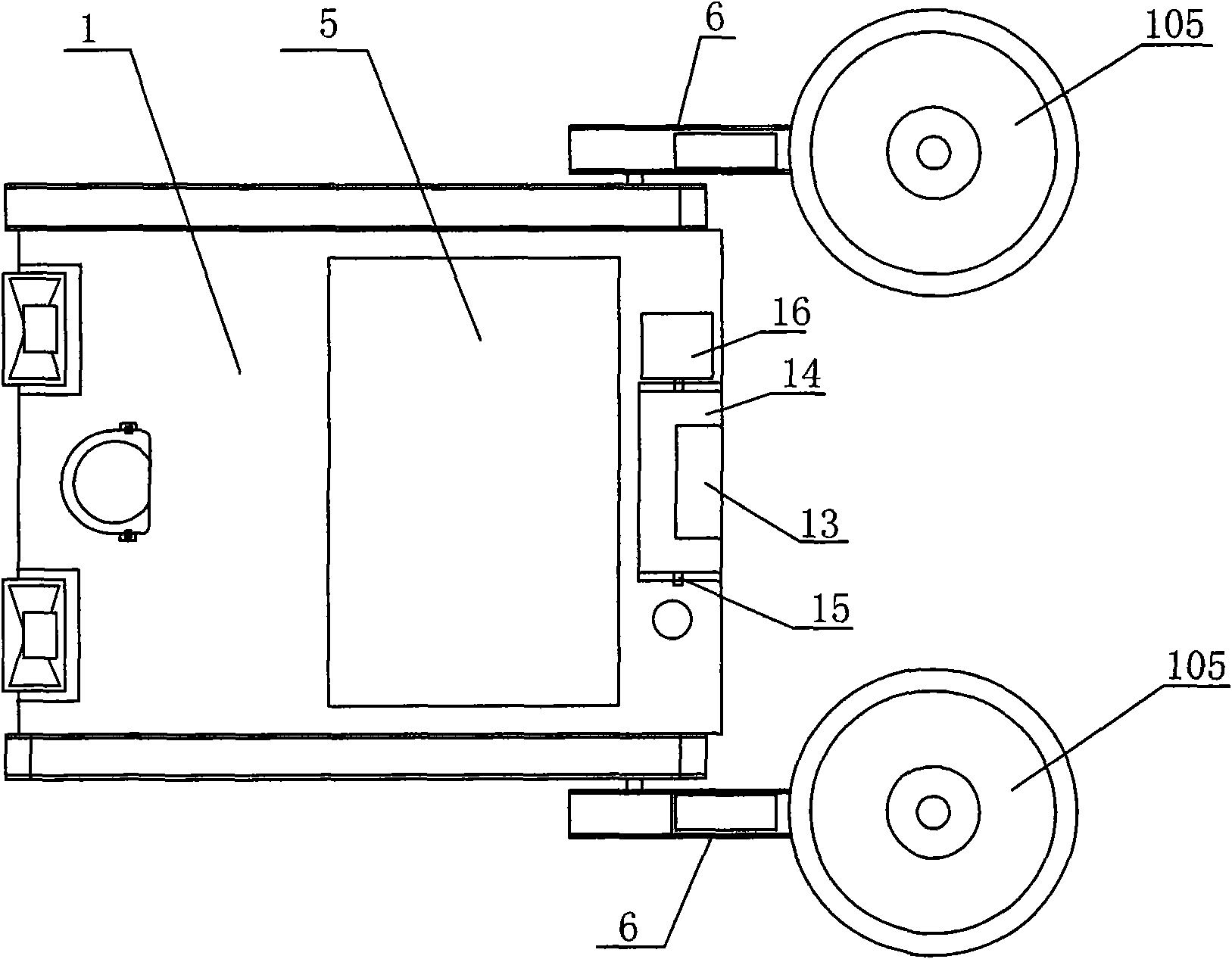
[0121] see figure 1 and figure 2 An obstacle-climbing arm 6 is installed on both sides of the front of the car body 1, and the rear ends of the two obstacle-climbing arms 6 with crawler belts 7 on the outer per...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More