

Five-coordination numerical control machine tool motion controller with NURBS interpolation function
A motion controller, CNC machine tool technology, applied in the direction of digital control, electrical program control, etc., can solve the problems of increased information volume, poor flexibility, limited NC program volume, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
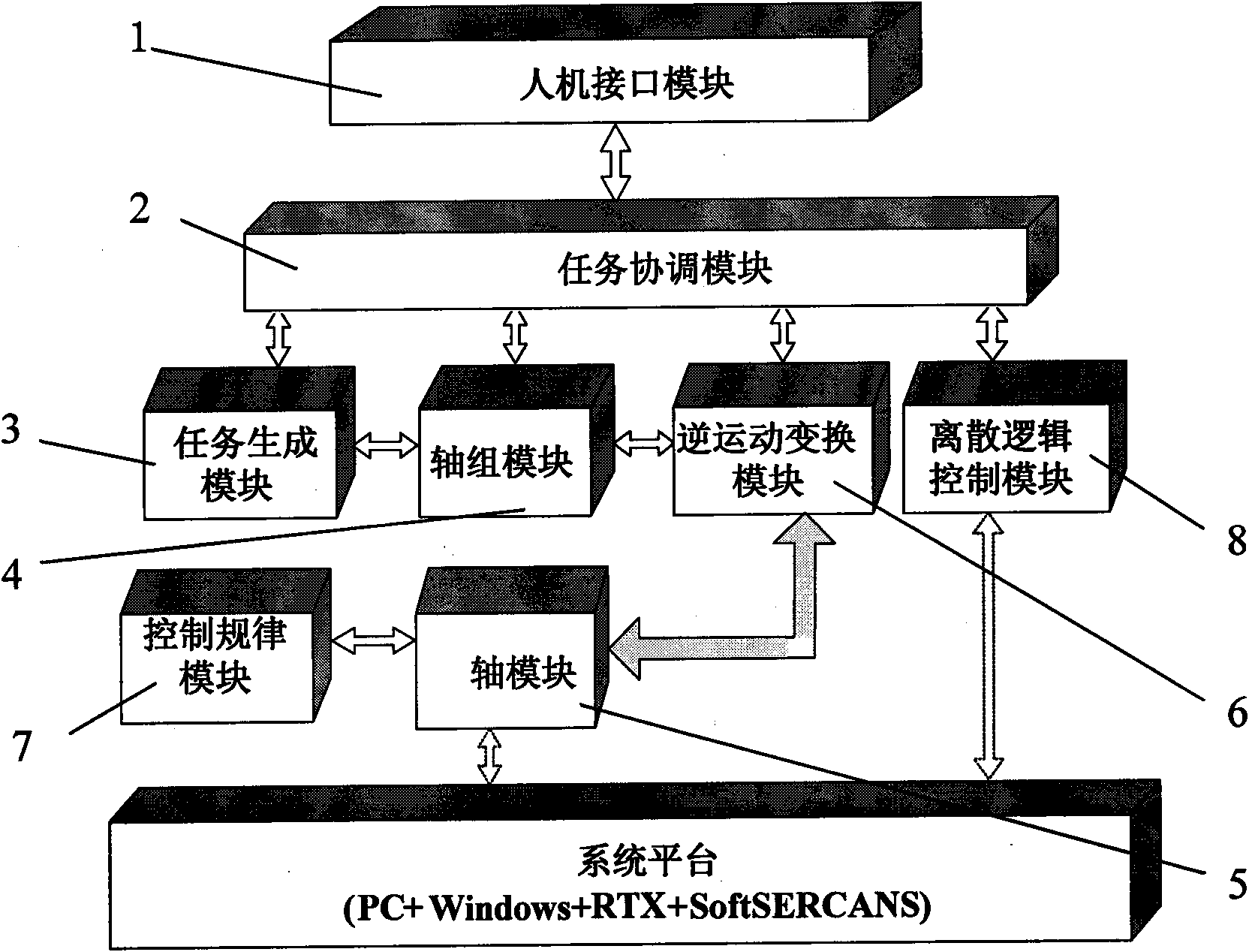
[0057] Specific implementation mode one: combine Figure 1~3 As shown, this embodiment is described:
[0058] The structure of the five-coordinate CNC machine tool motion controller with NURBS interpolation function described in this embodiment is as follows: the motion controller is an application program system running on the PC Windows operating system, and the motion controller reads five The motion instructions of each axis of the machine tool generated after the coordinate NC program are transmitted to the servo system through the SERCOS interface to realize the NC machining of the five-coordinate NC machine tool; the motion controller includes the following units: man-machine interface module 1, task coordination module 2, and task generation module 3. Axis group module 4, axis module 5, inverse motion transformation module 6, control law module 7 and discrete logic control module 8, wherein:
[0059] The human-machine interface module 1 is used to be responsible for t...
specific Embodiment approach 2
[0148] Specific embodiment two: the man-machine interface module 1, the task coordination module 2 and the task generation module 3 described in this embodiment perform non-real-time tasks, which are non-real-time modules of the motion controller, and adopt the Component Object Model (Component Object Model) , COM) technology development. Others are the same as in the first embodiment.
specific Embodiment approach 3
[0149] Specific embodiment three: the axis group module 4, the axis module 5, the inverse motion transformation module 6, the control law module 7 and the discrete logic control module 8 in this embodiment perform real-time tasks, which are real-time modules of the motion controller. Developed using Real-Time Dynamic Link Library (RTDLL) technology. Others are the same as in the first or second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More