

Autonomic optimal track following design method of free base butt-joint device
A free base, trajectory tracking technology, applied in neural learning methods, space vehicle docking devices, biological neural network models, etc. problems, to achieve the effect of achieving autonomy and intelligence, high practical value, and strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to make the content and technical solutions of the present invention clearer, the present invention is further described in detail by adopting a wheeled ground mobile robot as the kinematic base of the free base docking device.
[0040] The first step is to establish the motion model of the robot. In general, the kinematics model of a mobile robot can be considered as a two-wheel independently driven mobile car model with no sideslip and pure rolling, that is, it is assumed that the wheels move along a straight line on the ground, and the contact point with the ground at each time point The speed is equal to zero.
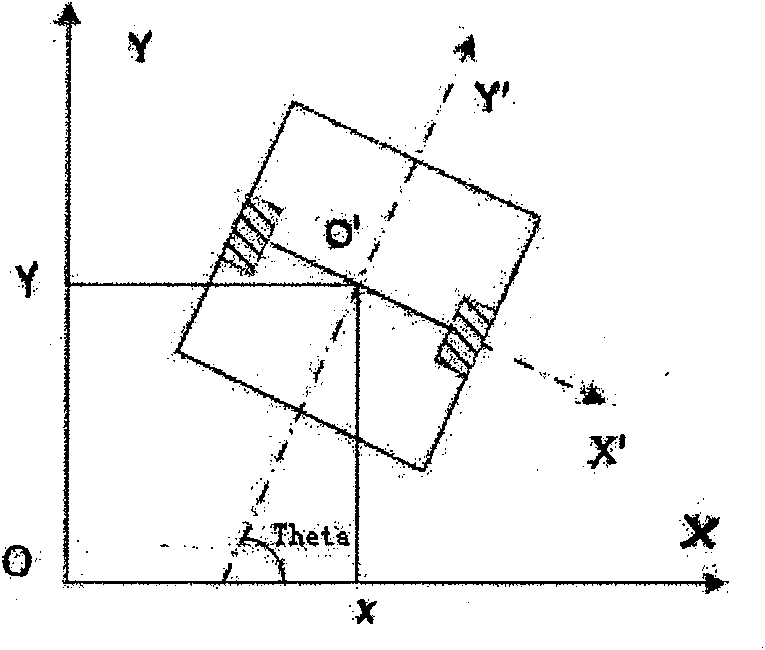
[0041] like figure 1 As shown, OXY is the inertial coordinate system, O'X'Y' is the coordinate system of the robot, where Y' is the positive direction of the robot, the shaded area is the position of the two driving wheels of the robot, and O' is located at the center of the two driving wheels The center point of the link. At this time, we can us...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More