

Position signal damping method of inertial navigation system based on variable damping coefficient
An inertial navigation system and signal damping technology, which is applied in the direction of navigation, measuring devices, instruments, etc. through speed/acceleration measurement, which can solve the problems of inability to adapt to the maneuvering state of ships, and achieve the effect of increasing the difficulty of implementation and improving adaptability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention is described in more detail below in conjunction with accompanying drawing example:
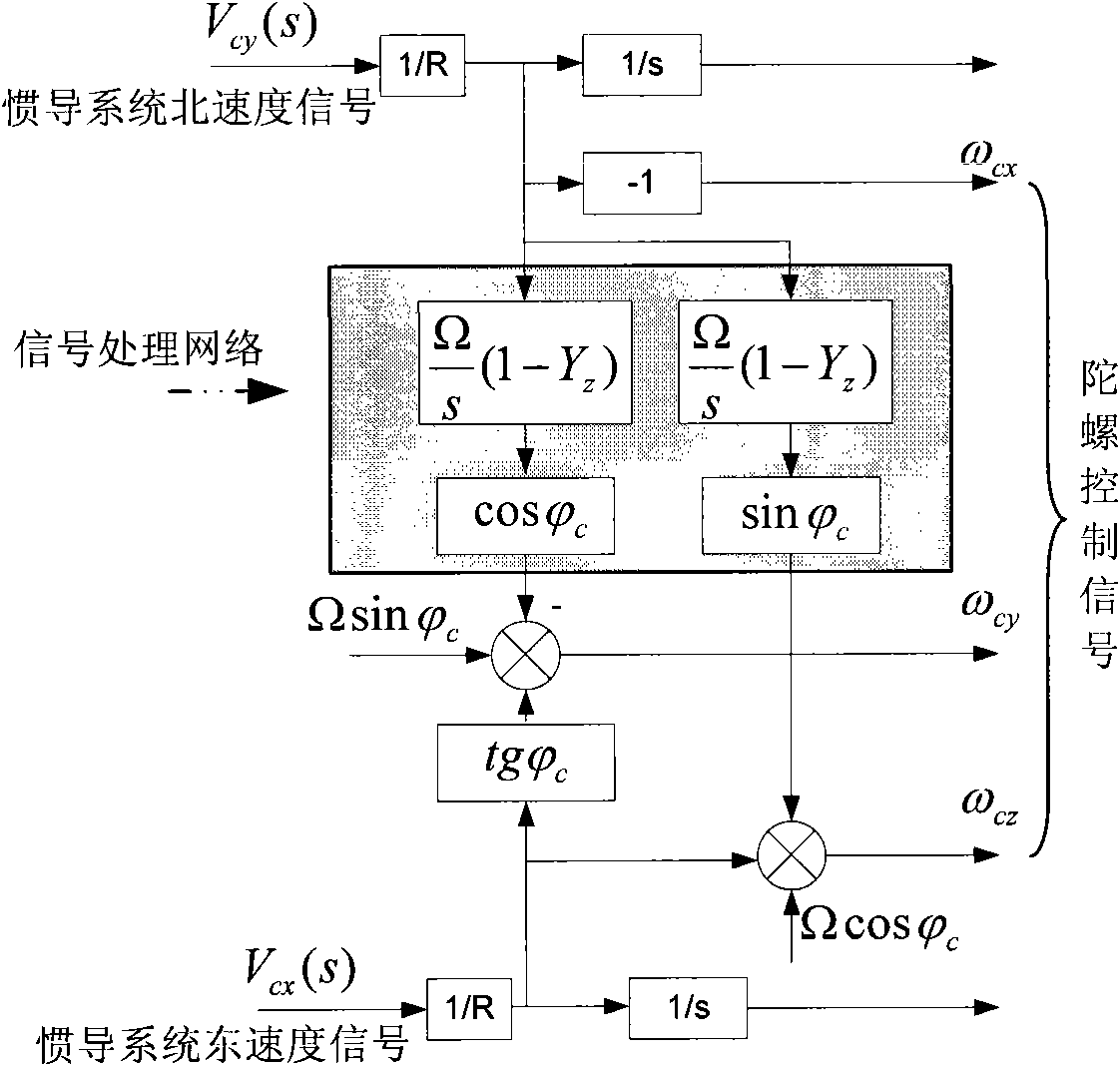
[0034] 1. Azimuth signal damping network design
[0035] (1) Introduction of signal damping network
[0036] From the error analysis of the inertial navigation system, it can be seen that the main reason for the periodic oscillation of the earth is the initial attitude deviation and latitude error of the system, and their cross-coupling will introduce the angular velocity component of the earth's rotation into the error of the inertial navigation system. Therefore, this patent introduces the azimuth signal damping network into the signal component of the earth's rotation angular rate for damping processing, namely:
[0037]
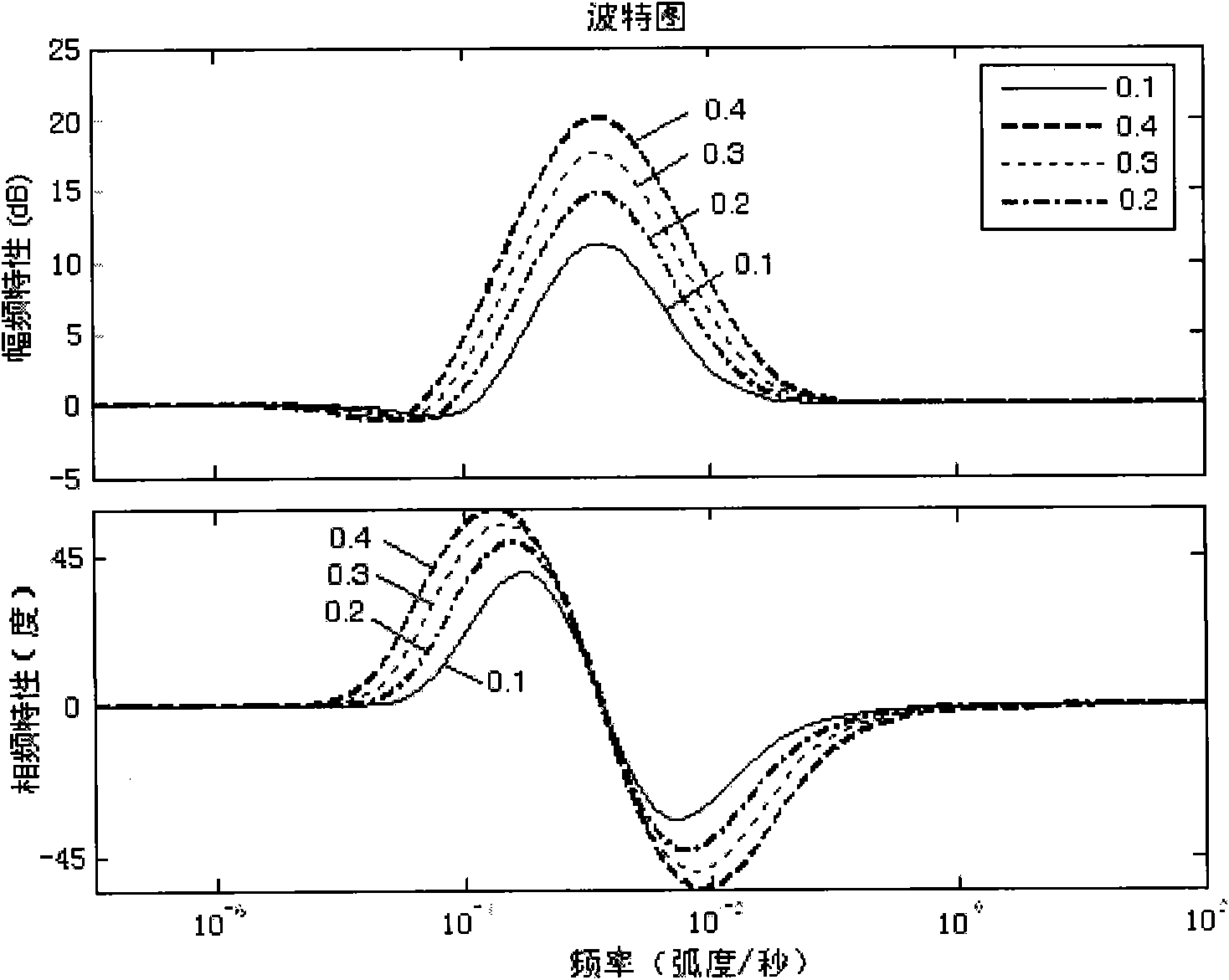
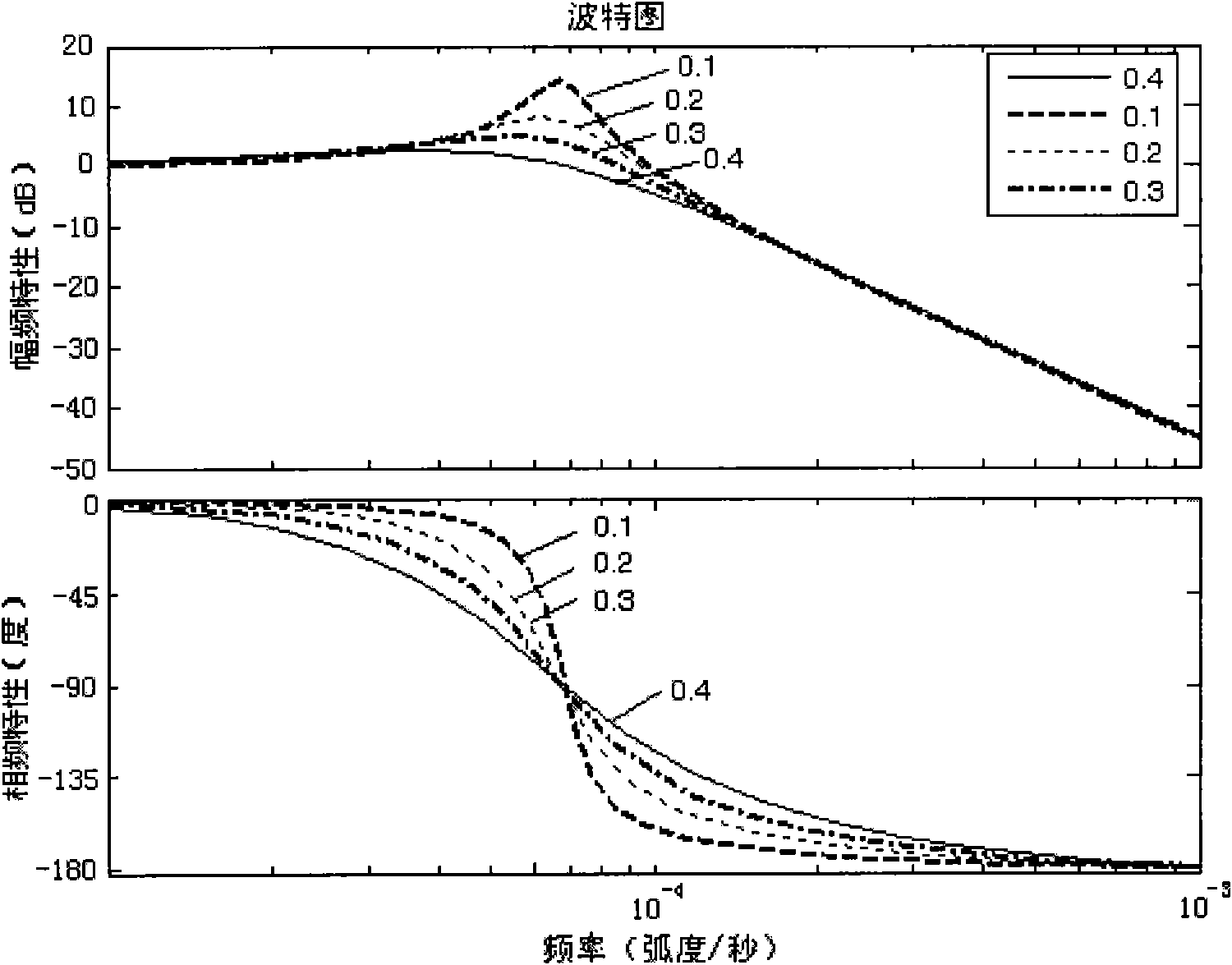
[0038] According to the requirement that the gain of the damping signal tends to be zero decibel at low frequency and high frequency, the third-order azimuth damping network has better amplitude-frequency and phase-frequency characteristi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More