

System and method for optimizing control of track of rotary crane
A trajectory optimization and control system technology, applied in the directions of load hanging components, transportation and packaging, can solve problems such as inability to guarantee linear motion, difficulty in trajectory tracking or coordination, and space limitations for safe motion, and achieve convenient positioning control, expansion, etc. The effect of lifting capacity and improving movement speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to understand the technical content of the present invention more clearly, the following examples are given in detail.
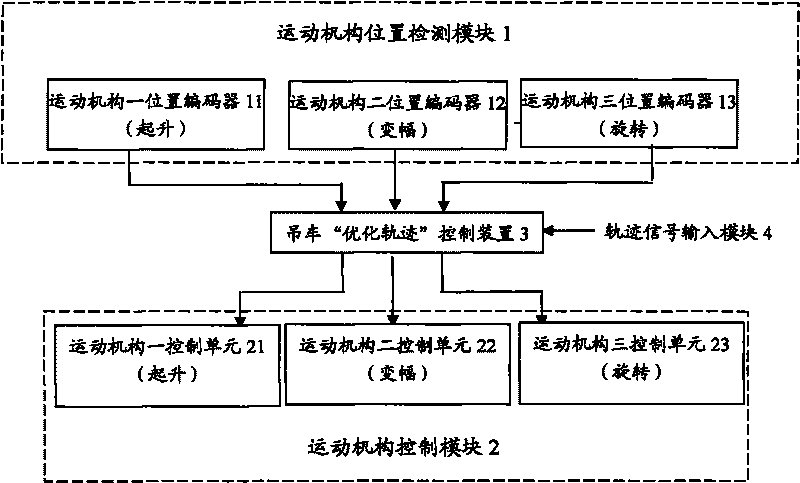
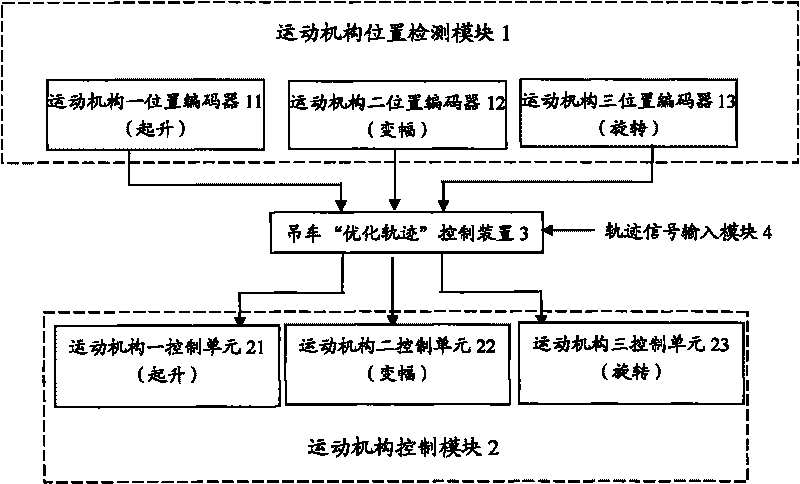
[0032] see figure 1 As shown in the trajectory optimization control system of the rotary crane, the rotary crane includes a spreader movement mechanism, and the spreader movement mechanism includes several movement mechanisms, wherein the control system includes a crane optimal trajectory control device 3. The position detection module 1 of the kinematic mechanism of the spreader and the position control module 2 of the kinematic mechanism of the spreader, the crane optimized trajectory control device 3 is connected with the position detection module 1 of the kinematic mechanism of the spreader and the position control module of the kinematic mechanism of the spreader respectively 2, and the position detection module 1 of the moving mechanism of the spreader and the position control module 2 of the moving mechanism of the spreader are respect...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More