

Non-contact scanning method for three-dimensional colour point clouds
A technology of color point cloud and scanning method, which is applied in image data processing, 3D modeling, instruments, etc., can solve problems such as layering of 3D point cloud, achieve the effect of improving splicing efficiency and rich system texture information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
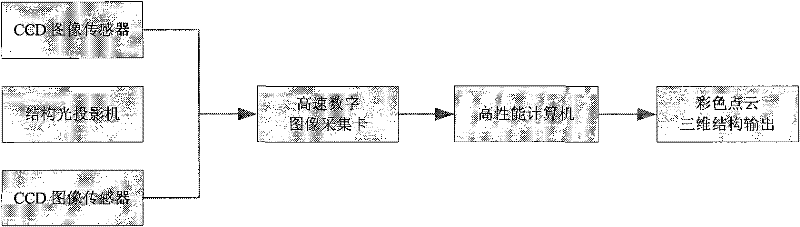
[0021] The three-dimensional scanning system image acquisition unit that the present invention adopts is made up of two color scanning cameras and an industrial structured light projector, see figure 1 . The entire scanning system is controlled by a computer, and 8 striped lights of different resolutions are projected onto the surface of the object to be measured through a structured light projector. At the same time, the computer controls two CCD image sensors to collect each projected color image to form a Gray space-time Coding, the computer will calculate the three-dimensional coordinates of the measured object space according to the positions of the two image pixels with the same phase (that is, the same gray space-time code) and the relative positions of the two CCD sensors.
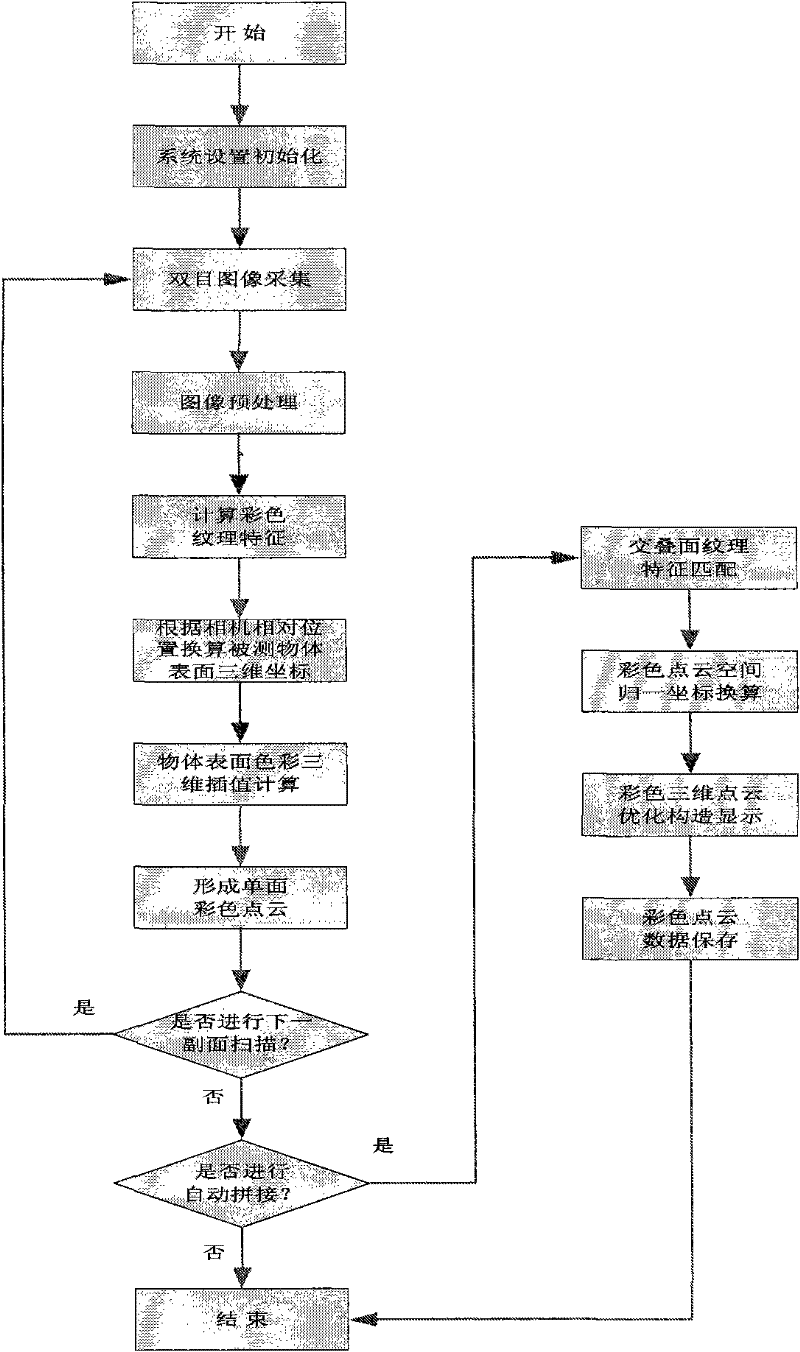
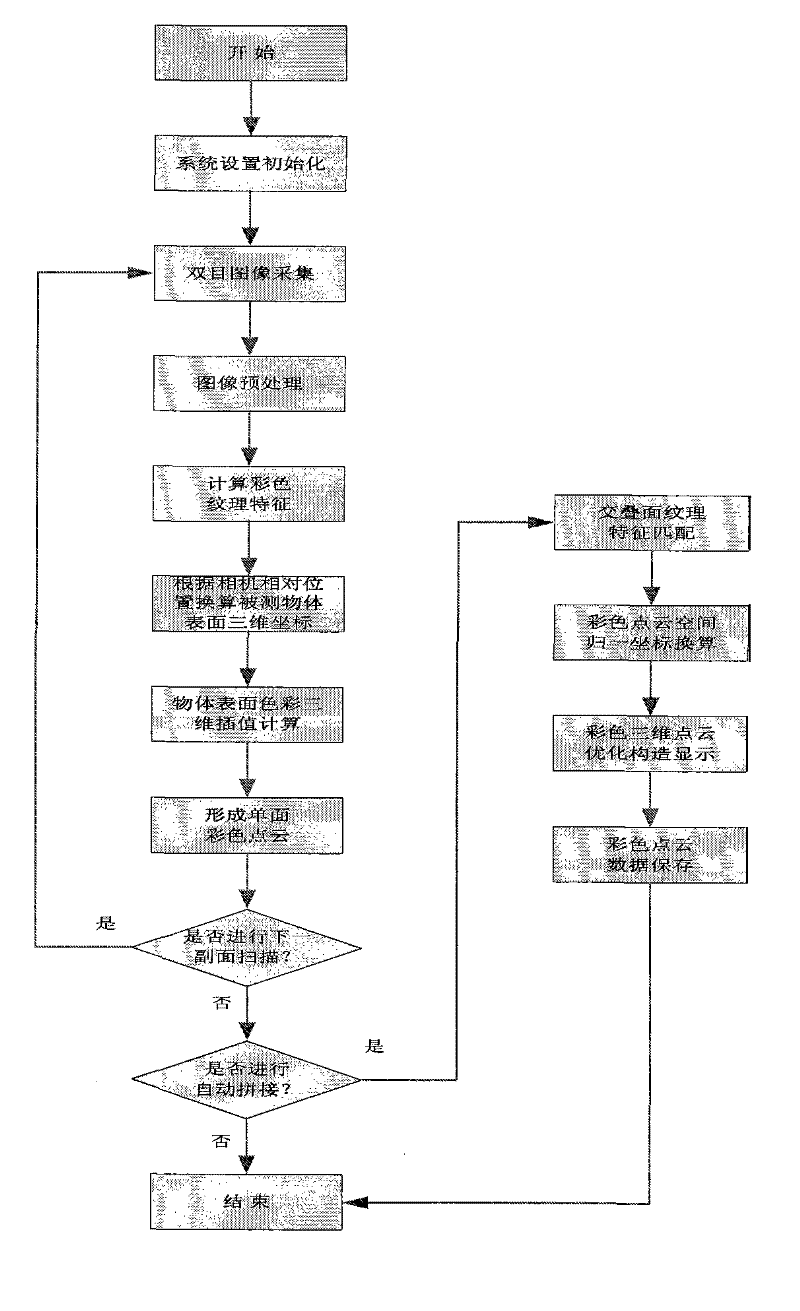
[0022] The main process of system software processing is as follows: figure 2 Shown: First, preprocess the images captured by the left and right cameras, and save each texture feature point after...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More