

Visual navigation based multi-crop row detection method
A detection method and visual navigation technology, which are applied in the field of multi-crop row detection of visual navigation, can solve problems such as difficulty in meeting the actual requirements of convergence, reduce time complexity and space complexity, and improve real-time and accuracy. real-time effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0054] This embodiment specifically describes a visual navigation multi-crop row detection method proposed by the present invention. The detection method is applied to an agricultural operation machine operating on a multi-crop row, and the operation machine is provided with a camera.
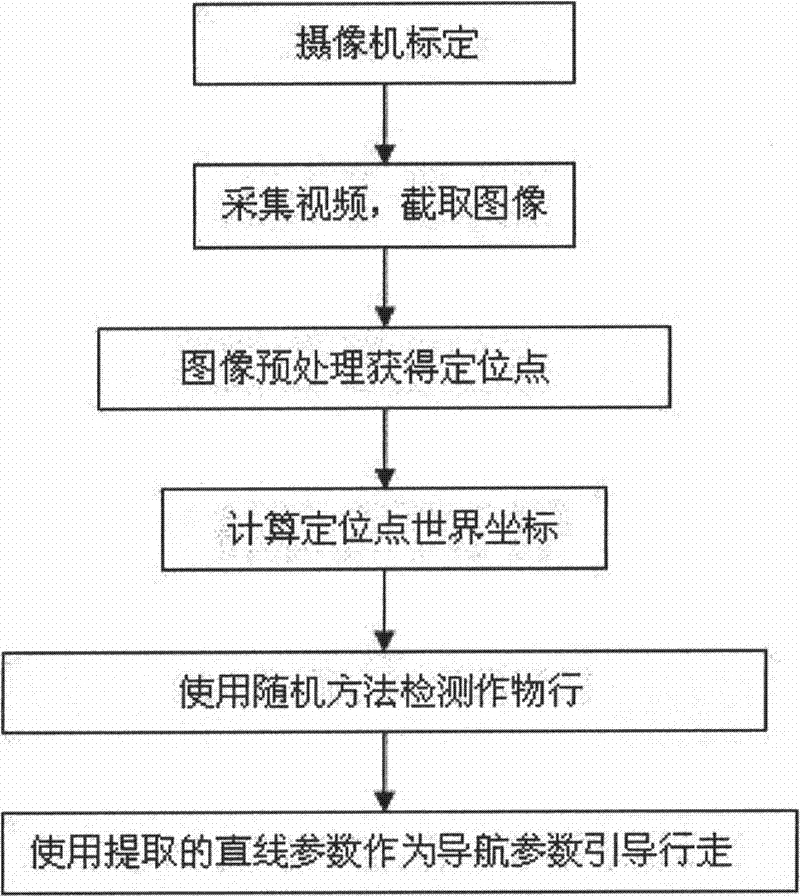
[0055] Such as figure 1 Shown, described detection method comprises the steps:
[0056] Step 1: Calibrate the internal parameters and / or external parameters of the camera on the agricultural machine, collect video and image frames, and perform distortion correction on the captured image in combination with the calibration parameters of the camera;
[0057] Among them, the internal parameters of the linear model include: (u 0 , v 0 ) is the pixel coordinate of the optical center on the computer image; α x , α y is the effective focal length; γ is the u, v-axis non-vertical factor, generally 0; the internal parameters of the nonlinear model also include the distortion parameter k 1 , k 2 ,p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More