

Two-rotation one-movement-freedom-degree decoupling parallel mechanism
A degree of freedom, parallel technology, applied in the direction of manipulator, program control manipulator, metal processing mechanical parts, etc., to achieve the effect of easy calibration, reduced development cost, and small moment of inertia
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
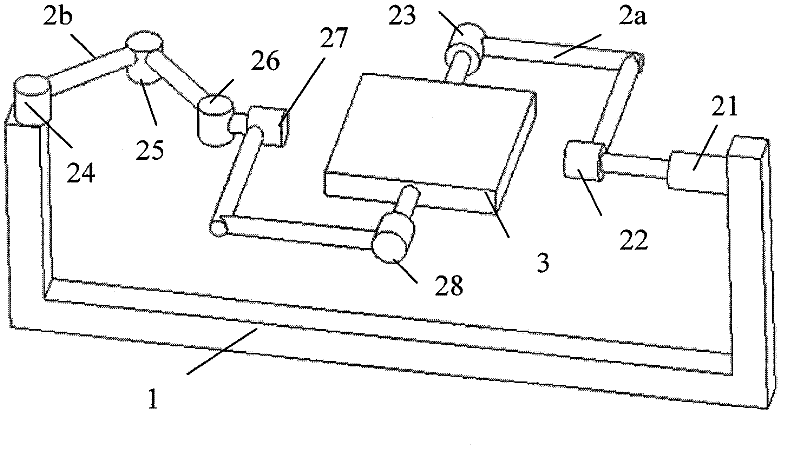
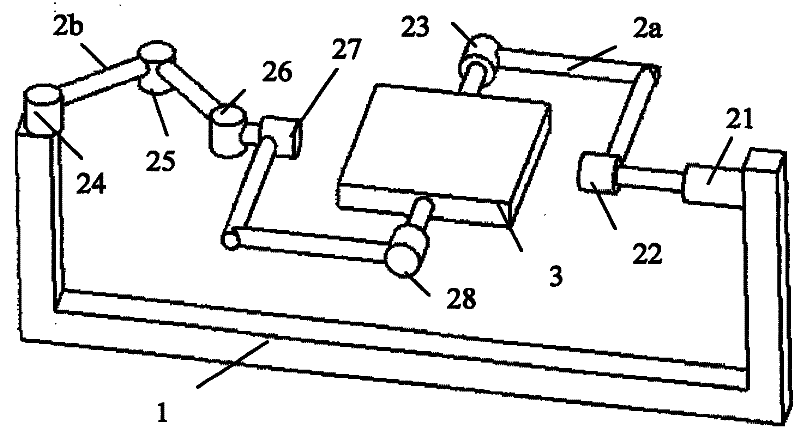
[0027] The present invention is a decoupling parallel mechanism with two rotations and one movement degree of freedom, such as figure 1 As shown, it consists of a frame 1, a moving platform 3 and two motion branch chains (the first movement branch chain 2a and the second movement branch chain 2b) connecting the frame 1 and the movement platform 3. The first movement branch chain The chain 2a includes a moving pair 21, a first rotating pair 22, a second rotating pair 23 and a rod. One end of the moving pair 21 is connected to the frame, and the other end is connected to the first rotating pair 22 and the second rotating pair 23 successively through a rod. Two rotating pairs 23 are connected to the moving platform 3, and the second kinematic branch chain 2b includes the third rotating pair 24, the fourth rotating pair 25, the fifth rotating pair 26, the sixth rotating pair 27, the seventh rotating pair 28 and the rod One end of the third rotating pair 24 is connected to the fram...
Embodiment 2
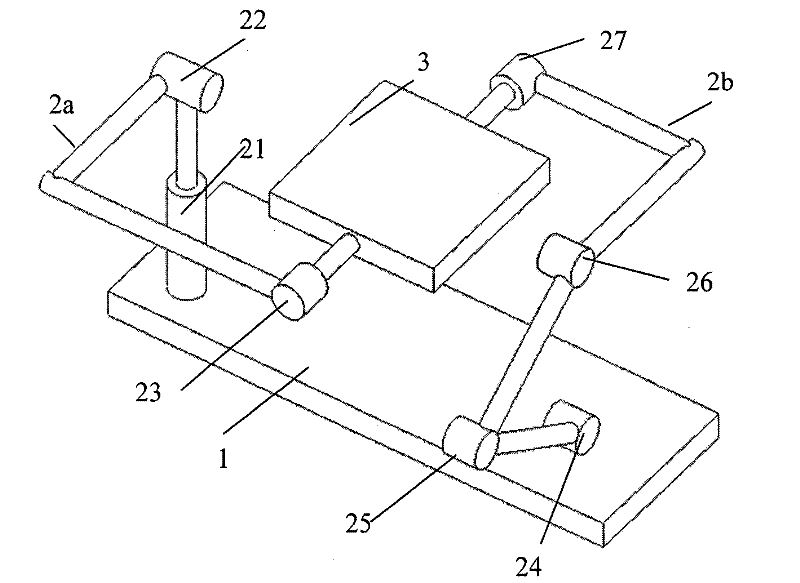
[0029] The present invention is a decoupling parallel mechanism with two rotations and one movement degree of freedom, such as figure 2 As shown, it consists of a frame 1, a moving platform 3 and two kinematic branch chains (the first kinematic branch chain 2a and the second kinematic branch chain 2b) connecting the frame 1 and the moving platform 3. The first kinematic branch chain 2a includes a moving pair 21, a first rotating pair 22, a second rotating pair 23 and a rod. One end of the moving pair 21 is connected to the frame, and the other end is sequentially connected to the first rotating pair 22 and the second rotating pair 23 through a rod. The rotating pair 23 is connected to the moving platform 3, and the second motion branch chain 2b includes the third rotating pair 24, the fourth rotating pair 25, the fifth rotating pair 26, the sixth rotating pair 27 and a rod, and one end of the third rotating pair 24 Connect the frame, and the other end is sequentially connecte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More