

Underactuated biped robot excitation planning and control method
A technology of biped robot and control method, which is applied in the field of excitation planning and control of underactuated biped robot, can solve the problem that it cannot be stabilized, has no real-time underactuated biped robot excitation planning and control method, and is not completely controllable and other problems, to achieve real-time completion of planning and control, overcome trajectory planning and control problems, and achieve high real-time effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0016] The present invention will be further described below in conjunction with the drawings and specific embodiments.
[0017] General planning and control of under-actuated biped robots include joint (active and passive joints) angle position sensors, joint angle speed sensors, joint angle acceleration sensors, load cells, controllers and servo drives. The under-actuated biped robot of the present invention Incentive planning and control methods need to call these existing hardware.
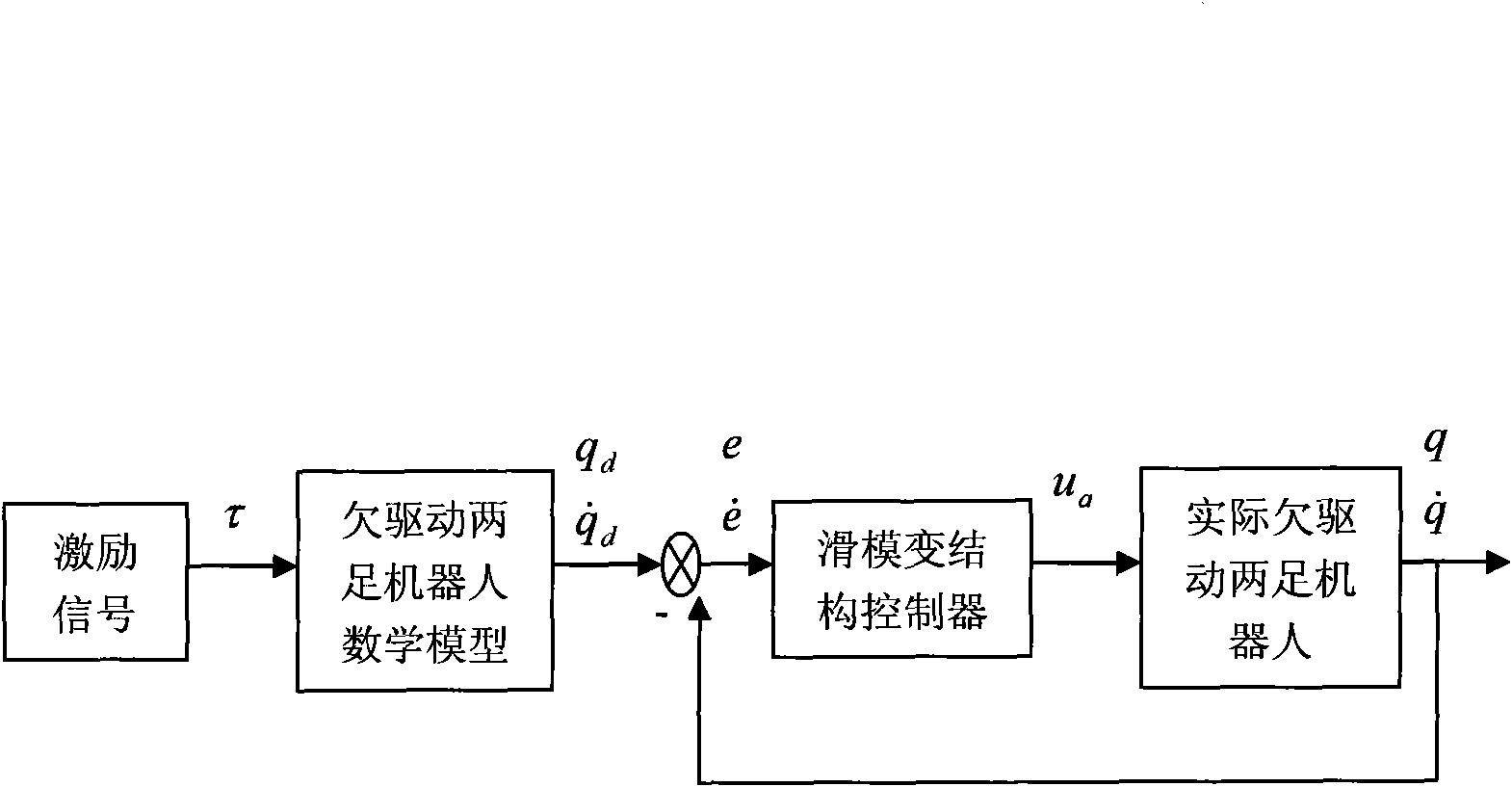
[0018] The control process of the excitation planning and control method of the under-driven biped robot of the present invention is as follows:
[0019] (1) Establish the mathematical model of the under-actuated biped robot, and simplify the mathematical model to the system state equation. The mathematical model of the general under-actuated biped robot is simplified to the following mathematical model:
[0020] M aa M ap M pa M pp q · · a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More