

Self-evolution ANFIS and UKF combined GPS/MEMS-INS integrated positioning error dynamic forecasting method
A technology of error dynamics and prediction methods, applied in satellite radio beacon positioning systems, measuring devices, surveying and mapping and navigation, etc., can solve problems such as large prediction errors, achieve real-time performance, improve dynamic applicability and self-adaptive capabilities Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
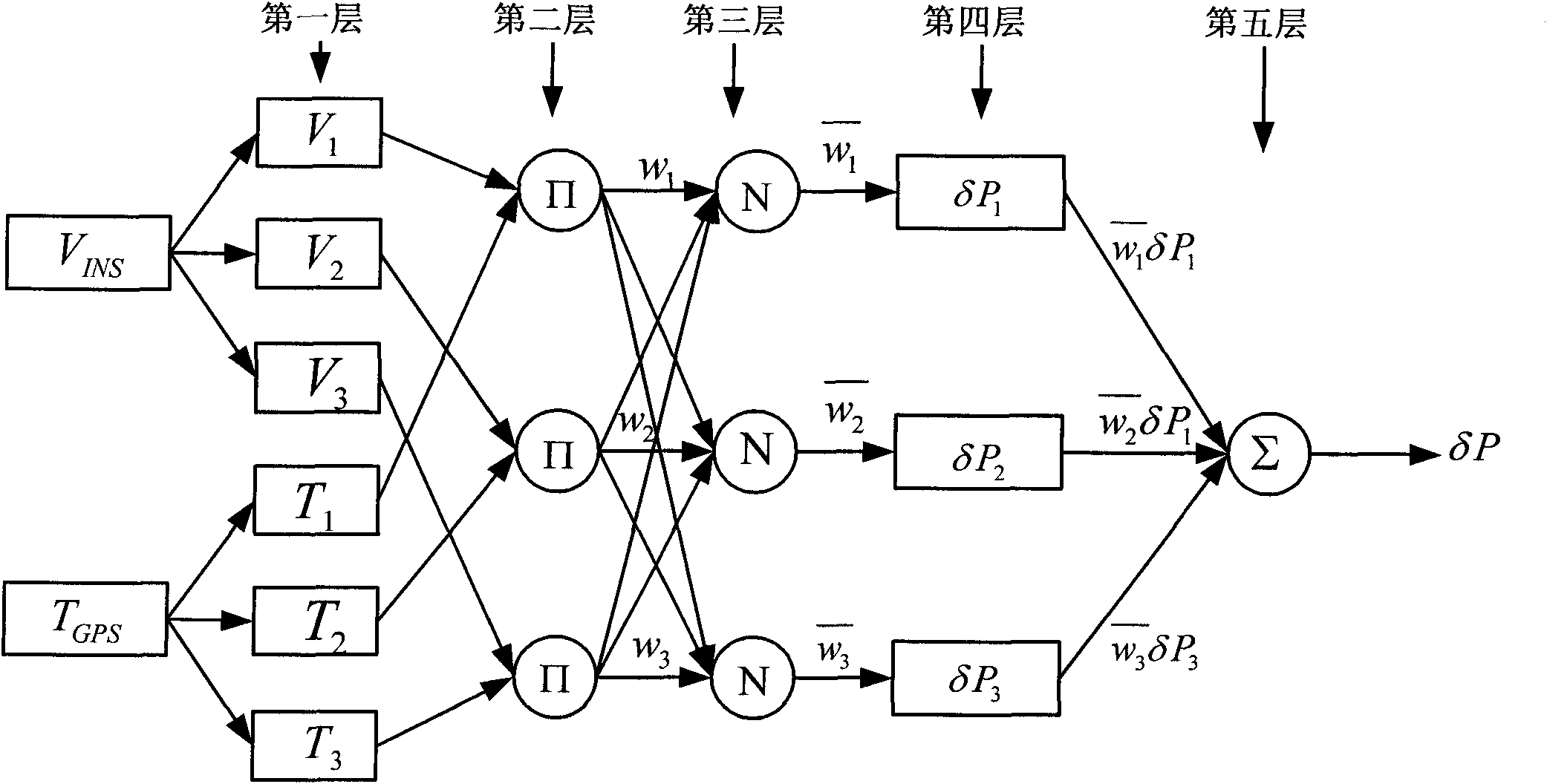
[0034] The structure diagram of ANFIS is as follows: figure 2 As shown, here it is assumed that the fuzzy inference system has two inputs: the speed V of the INS output INS and GPS signal loss time T GRS , and the single output is the position estimation error when the UKF is in the prediction state. Using the first-order Sugeno fuzzy model, assuming that each input corresponds to three fuzzy sets, the general rule set with M (here M is assumed to be 3) fuzzy if-then rules is as follows:
[0035] Rule i: If V INS ∈V i ,T GPS ∈ T i , then δP i =p i V INS +q i T GPS + r i , i=1, 2..., c
[0036] Here the nodes of the same layer have the same function (the output of the i-th node in layer 1 is O l,i ), the mathematical functions of each layer are introduced as follows:
[0037] Layer 1 Each node i in this layer is an adaptive node with a node function.
[0038] O 1 , i = ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More