Device and method for detecting impurities after filling of beverage
A detection method and detection device technology, applied in the direction of optical defect/defect, image analysis, instrument, etc., can solve the problems of high missed detection rate, low efficiency, affecting product quality, etc., and achieve the effect of saving cost and improving detection quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] specific implementation plan
[0057] Below in conjunction with accompanying drawing, the present invention is further described in detail:
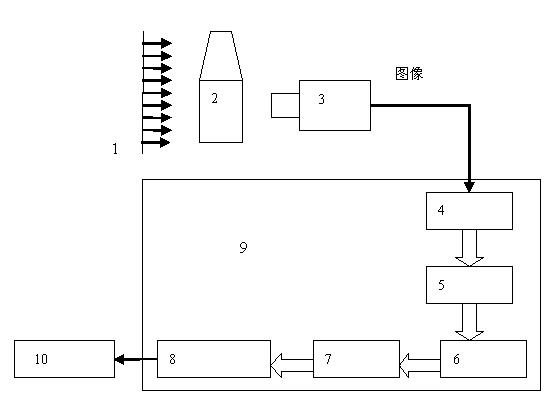
[0058] Such as figure 1 As shown, a device for detecting impurities after beverage filling, the device includes a light source 1 and a camera 3, the light source 1 and the camera 3 cooperate with the product 2 to be inspected; the camera 3 is connected to the target segmentation unit of the processing device 9 4; the target segmentation unit 4, the information extraction unit 5, the information matching unit 6, the trajectory acquisition unit 7 and the product quality analysis unit 8 of the processing device 9 are connected in sequence; the product analysis unit 8 is also connected with the control outside the processing device 9 The device 10 is connected.
[0059] The image acquisition comes from several frames of beverage bottle body images extracted by industrial cameras and flipped by mechanical devices. The lighting scheme...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



