

Small-size water surface robot device and self-adaptive flow optimizing navigation method
A surface robot and small-scale technology, applied in water-based ship navigation equipment, two-dimensional position/channel control, navigation aid arrangement, etc., can solve problems such as collisions and ship capsizing, and achieve the goal of increasing running time, reducing energy consumption, and optimizing driving path effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Below in conjunction with accompanying drawing and specific embodiment the present invention will be further described:
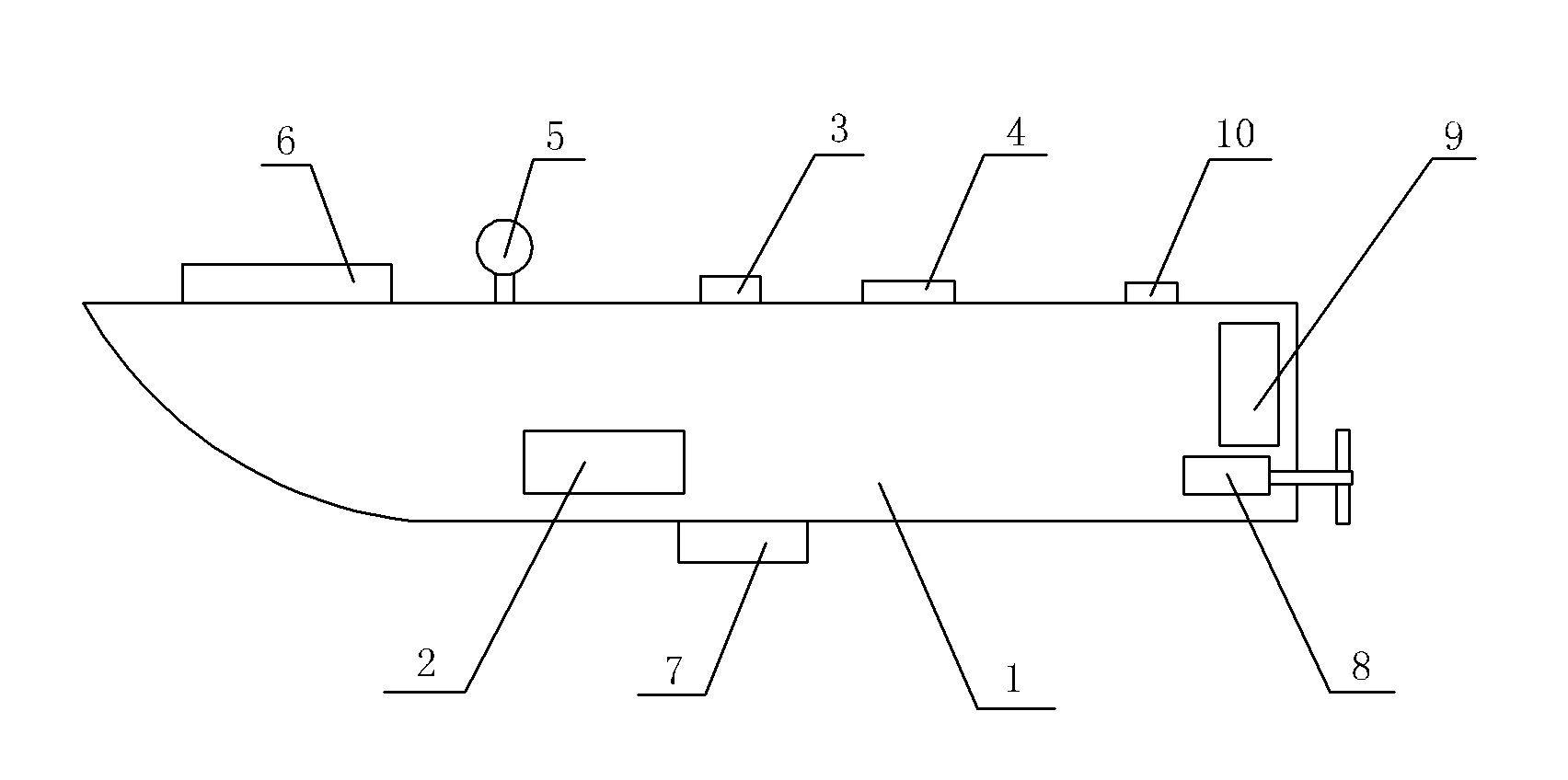
[0028] Such as Figure 1 to Figure 4 As shown, the small-sized water surface robotic device includes a hull 1 and a driving device and a control device arranged on the hull 1, and the control device includes a water velocity sensor 7, a navigation device and a central controller 2; the navigation device includes a GPS satellite positioning The sensor 3, the electronic compass 10 and the inertial navigation module 4; the navigation device is connected to the central controller 2 circuit; the control device is connected to the driving device circuit, and realizes the automatic navigation of the hull 1.
[0029] In this embodiment, the inertial navigation module 4 includes a three-axis gyroscope or a three-axis acceleration sensor. The control device also includes a radar 5 and a laser ranging sensor 6 . The driving device includes a battery 9 and a d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More