

Bionic cockroach robot based on double-four link mechanism
A cockroach robot and double four-link technology, applied in the field of bionic robots, can solve the problems of affecting the stability and accuracy of motion, weak rigidity and stability of the whole machine, insufficient robot carrying capacity, etc., and achieve compact structure and large working space , the effect of simple configuration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described in detail below in conjunction with the accompanying drawings.
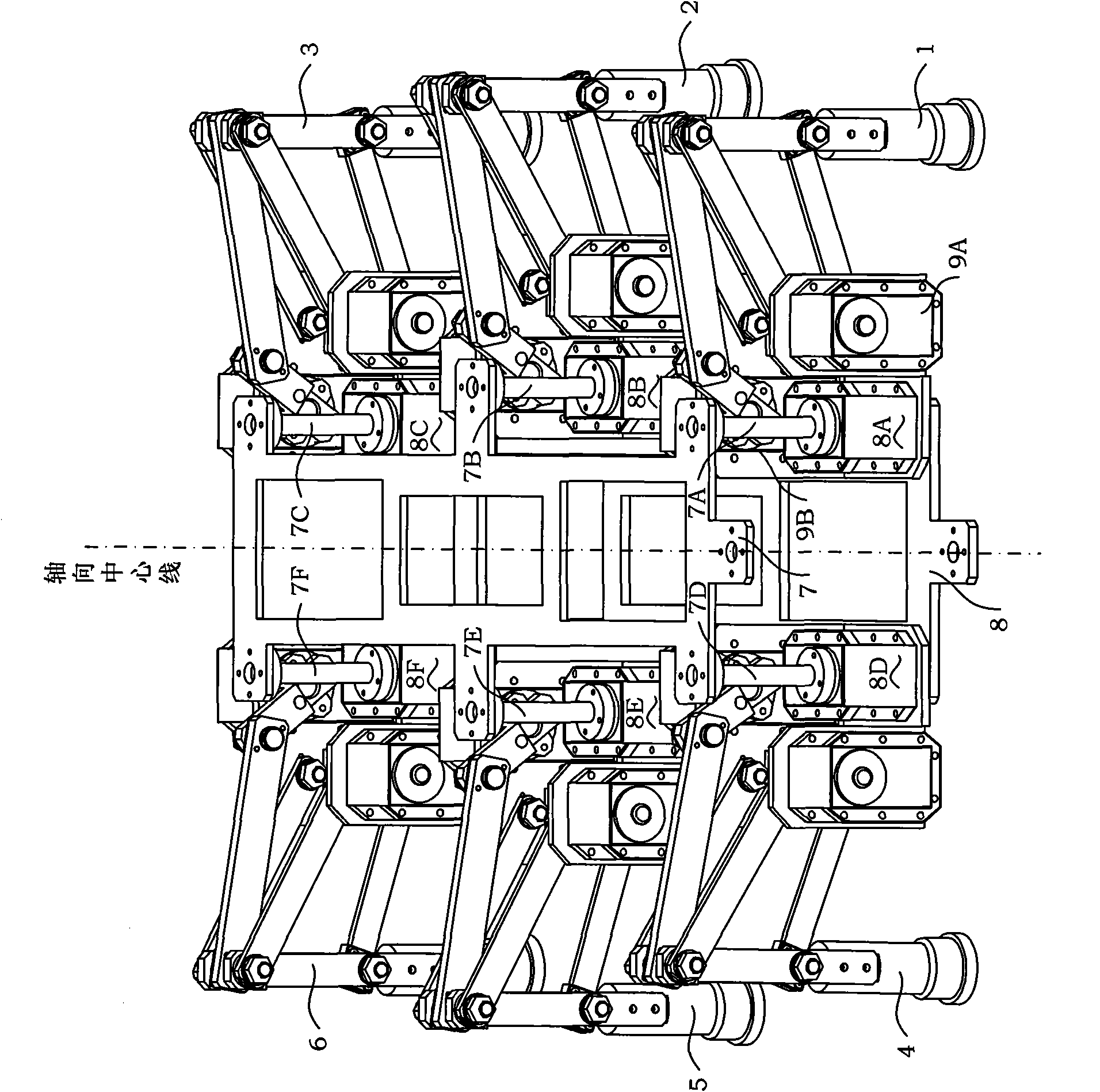
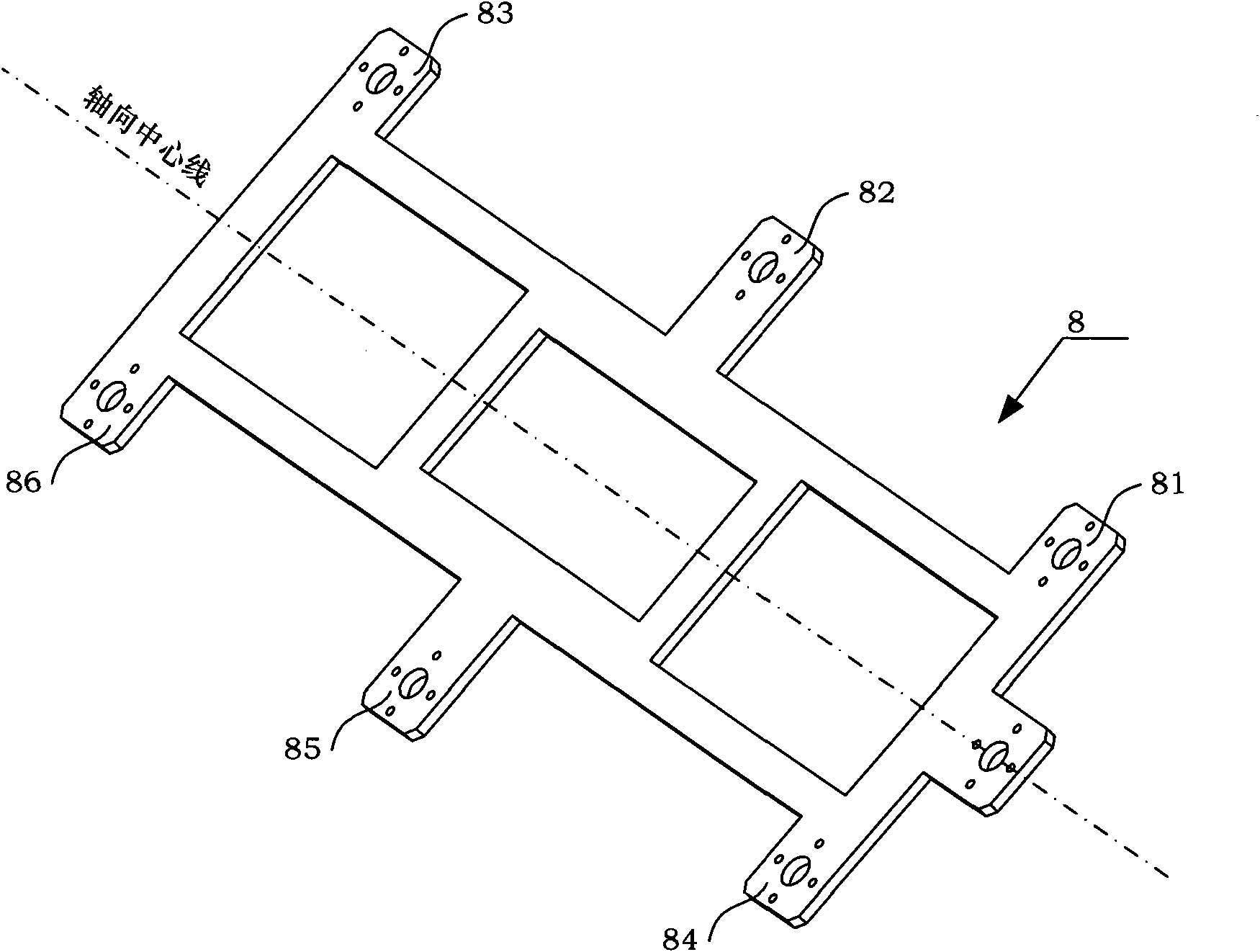
[0023] see figure 1 As shown, the present invention is a bionic cockroach robot based on a double four-bar linkage mechanism, the robot includes a left forefoot assembly 1, a left middle foot assembly 2, a left rear foot assembly 3, a right forefoot assembly 4, and a right middle foot assembly 5 , right rear foot assembly 6, upper connecting plate 7 and lower connecting plate 8. Wherein, the left forefoot assembly 1, the left middle foot assembly 2, the left rear foot assembly 3, the right forefoot assembly 4, the right middle foot assembly 5 and the right rear foot assembly 6 have the same structure. The upper connecting plate 7 and the lower connecting plate 8 have the same structure.
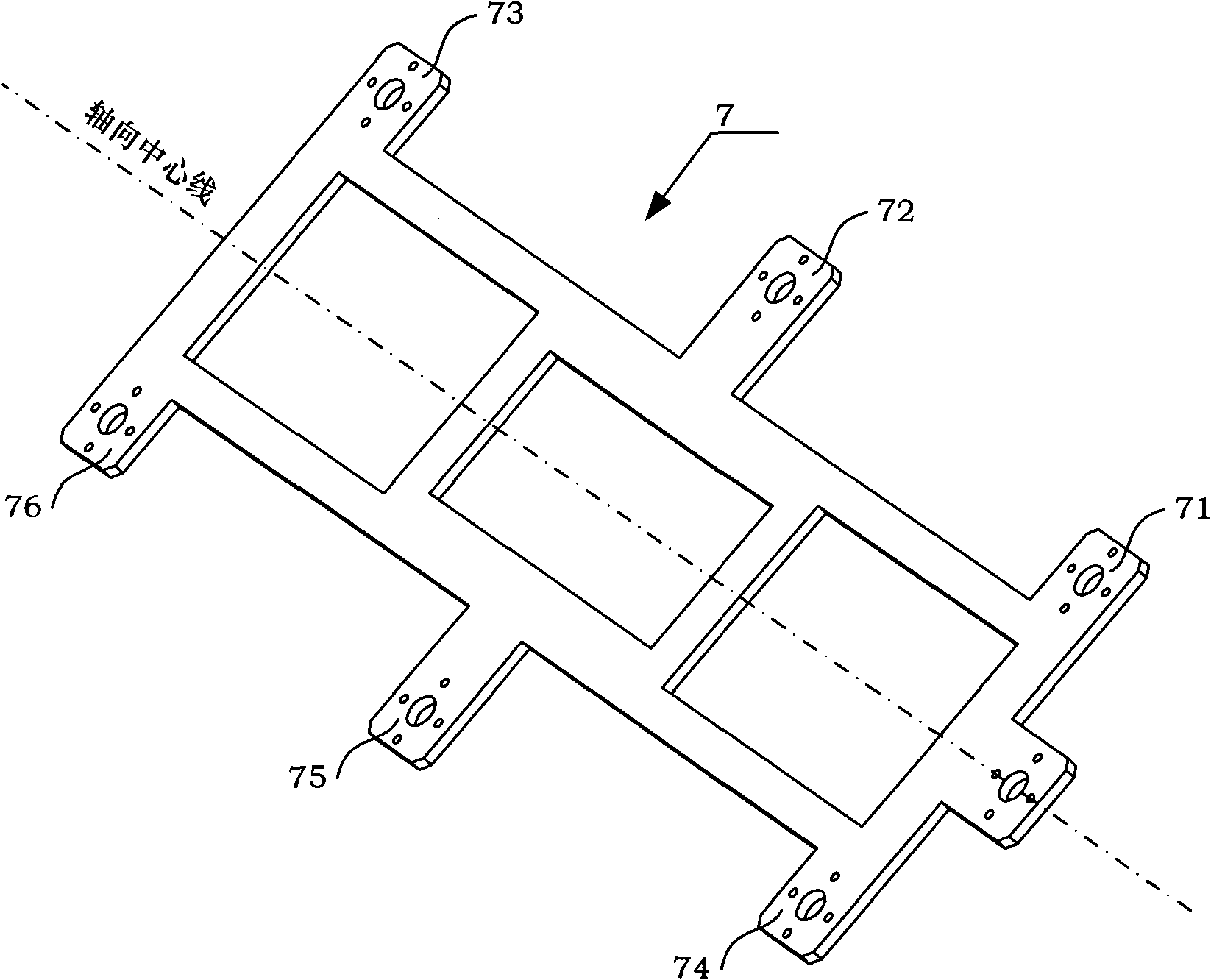
[0024] see figure 2 As shown, the upper connecting plate 7 is integrally processed and formed, and the upper connecting plate 7 is symmetrically provided with connecting...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More