Control system for low-speed running of permanent magnet motor
A control system and permanent magnet motor technology, applied in the direction of torque ripple control, etc., can solve the problems of no consideration of influence, large error, and reduced response speed of the control system, so as to achieve increased response speed, increased stability, and good adaptability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
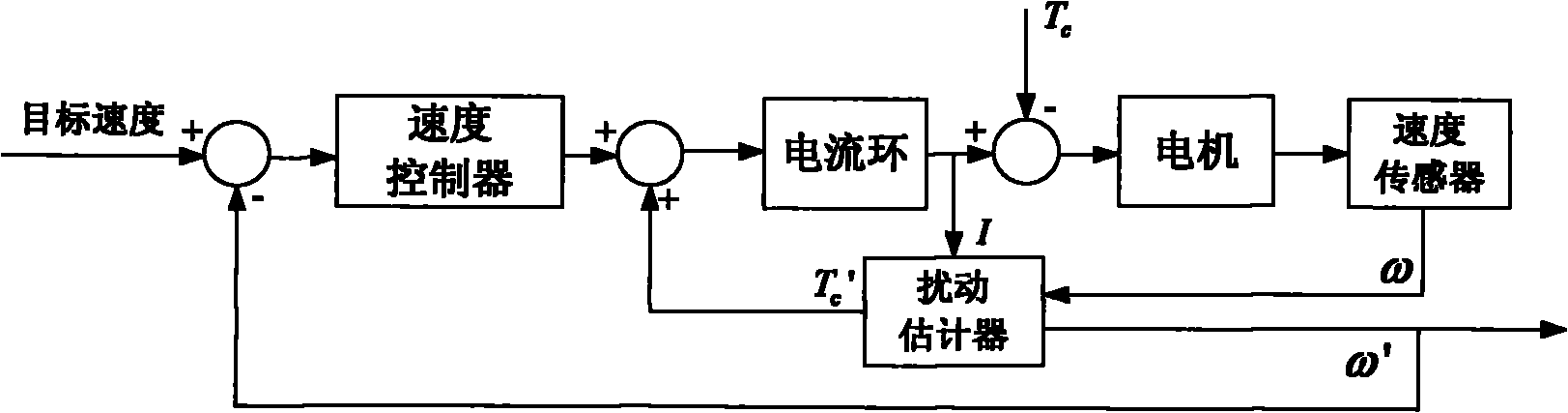
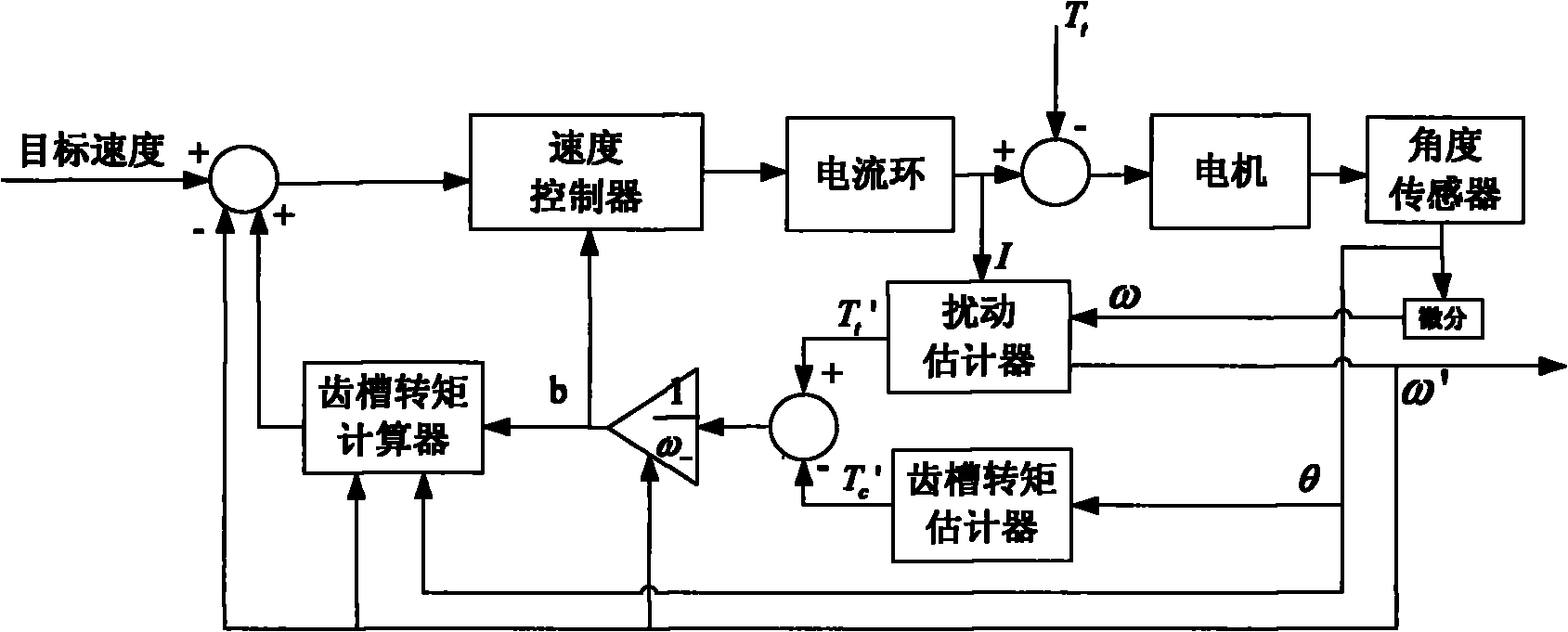
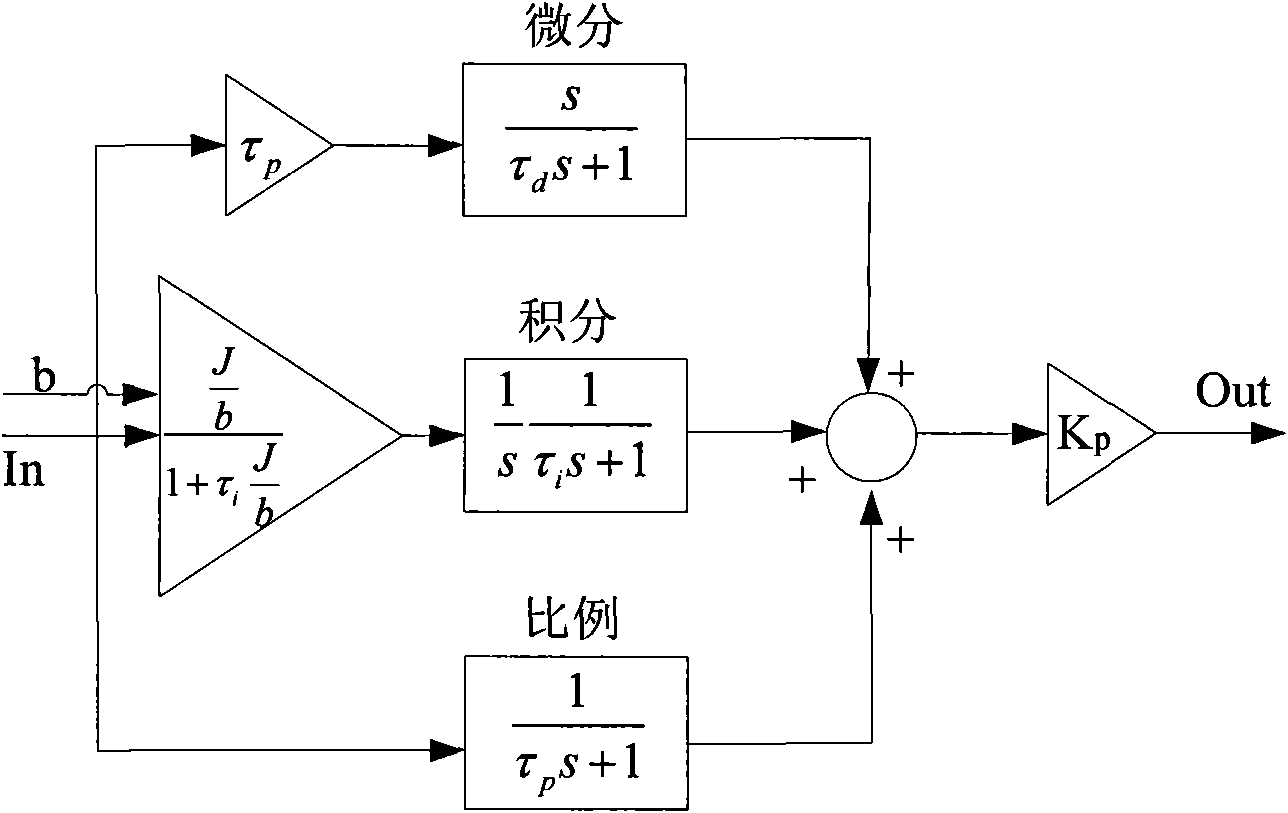
[0020] 1. According to figure 2 The block diagram shown in the figure builds the control system; the block diagram of the adaptive PID controller is shown in image 3 shown; the block diagram of the disturbance estimator is shown in Figure 4 Shown; the feedback speed ω of the outermost loop of the control system - Both the estimated speed ω′ and the measured speed ω can be used. In general, if the resolution of the sensor is high enough, the output of the estimator can be used as feedback. If the resolution of the sensor is not high but the response is fast enough, the speed obtained by differential of the sensor can be used as feedback.
[0021] 2. Select the pole op of the disturbance estimator 1 and op 2 , you can make op 1 =op 2 And select 2-6 times of the pole corresponding to the 3dB bandwidth of the control system; use the acker function of Matlab software to calculate the feedback gain g required by the disturbance estimator 1 and g 2 , the use of the acker f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com