Method and device for improving positioning accuracy of wireless communication system by soft information
A wireless communication system and accuracy technology, applied in radio wave measurement systems, location-based services, positioning, etc., can solve the problems of high computational complexity and high complexity of the maximum similarity algorithm, affecting positioning accuracy, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
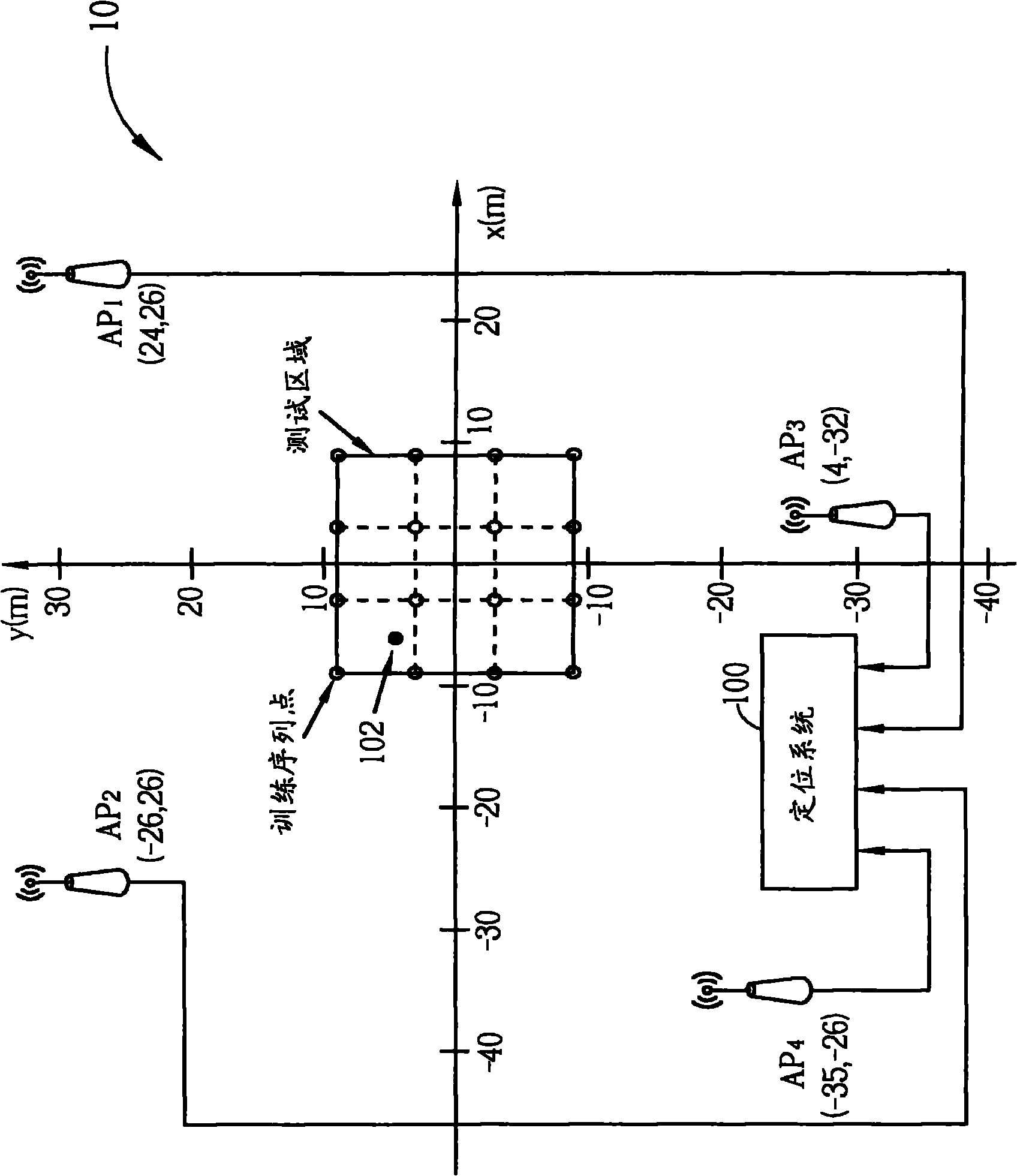
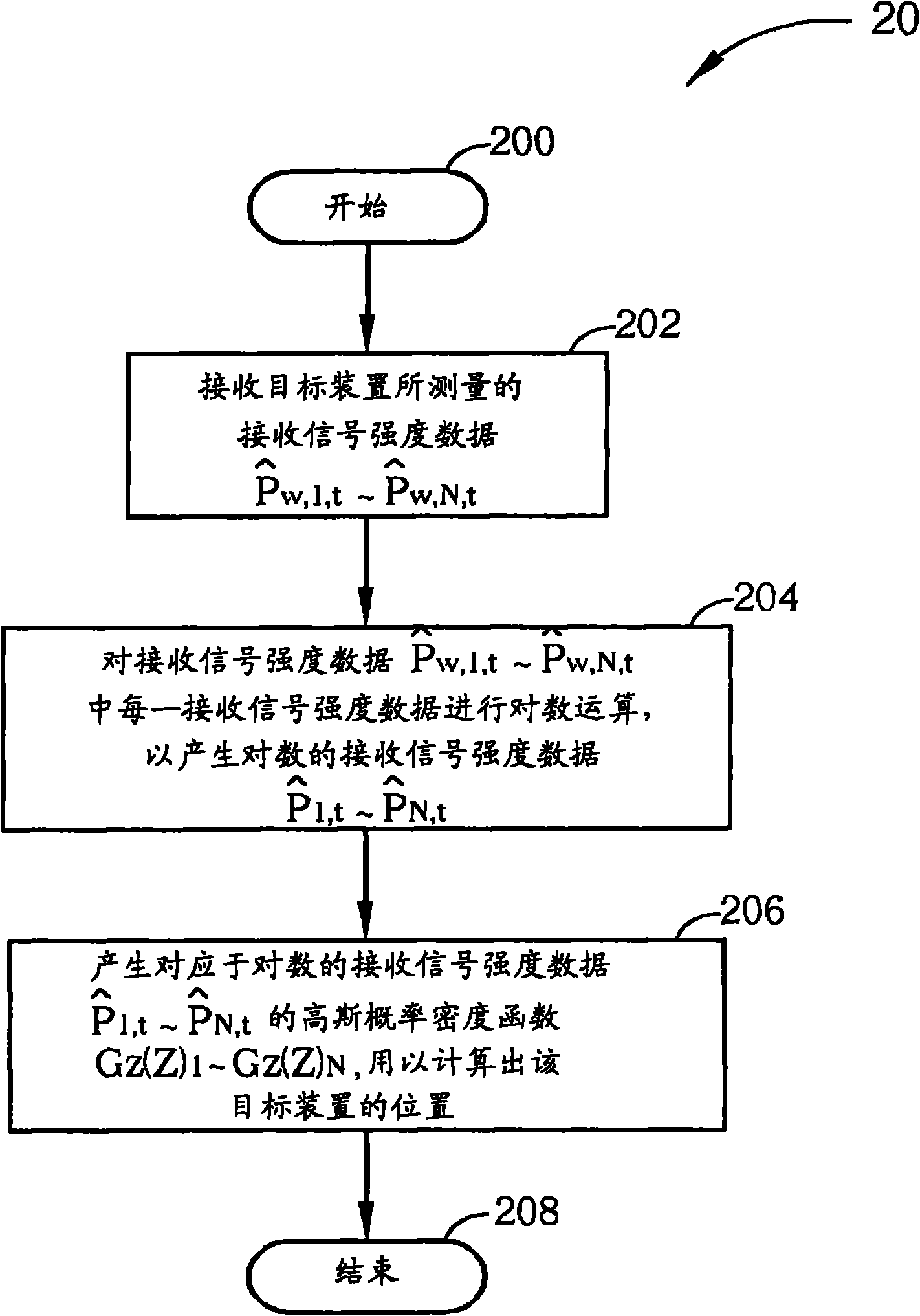
[0023] The concept of the present invention relates to the algorithm proposed in the paper "A Novel Indoor RSS-basedPosition Location Algorithm Using Factor Graph" published by the applicant in IEEE TRANSACTIONSON WIRELESS COMMUNICAITON in March 2009. Please refer to figure 2 , figure 2 It is a schematic diagram of the process 20 of the embodiment of the present invention. The process 20 is used in a positioning system to improve the problem of insufficient positioning accuracy of the existing Receive Signal Strength method. The process 20 assumes that the positioning system is set in an area, where there are base stations AP1-APN, and the base stations AP1-APN can detect the target device entering the area and send radio signals to the target device; at the same time, the positioning system can receive signals from the base stations AP1-APN. APN and received signal strength data of the target device. Process 20 includes the following steps:
[0024] Step 200: start.
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More