

Repetitive motion planning method for redundant manipulator
A technology of repetitive motion and robotic arm, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of not considering the acceleration limit, physical damage of the mechanical arm, and failure to meet the requirements of the mechanical arm.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with the drawings.
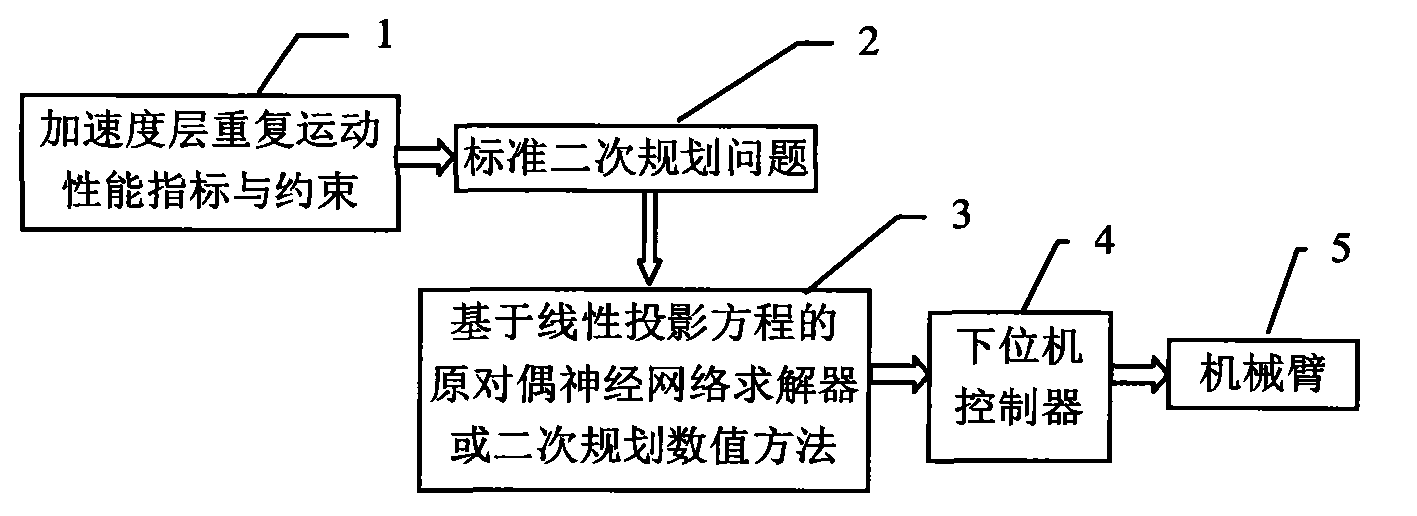
[0020] figure 1 The redundant manipulator repetitive motion planning method shown is mainly composed of acceleration layer repetitive motion performance indicators and constraints 1, standard quadratic programming 2, primal dual neural network solver based on linear projection equations or quadratic programming numerical method 3, lower level The machine controller 4 and the robot arm 5 are composed.
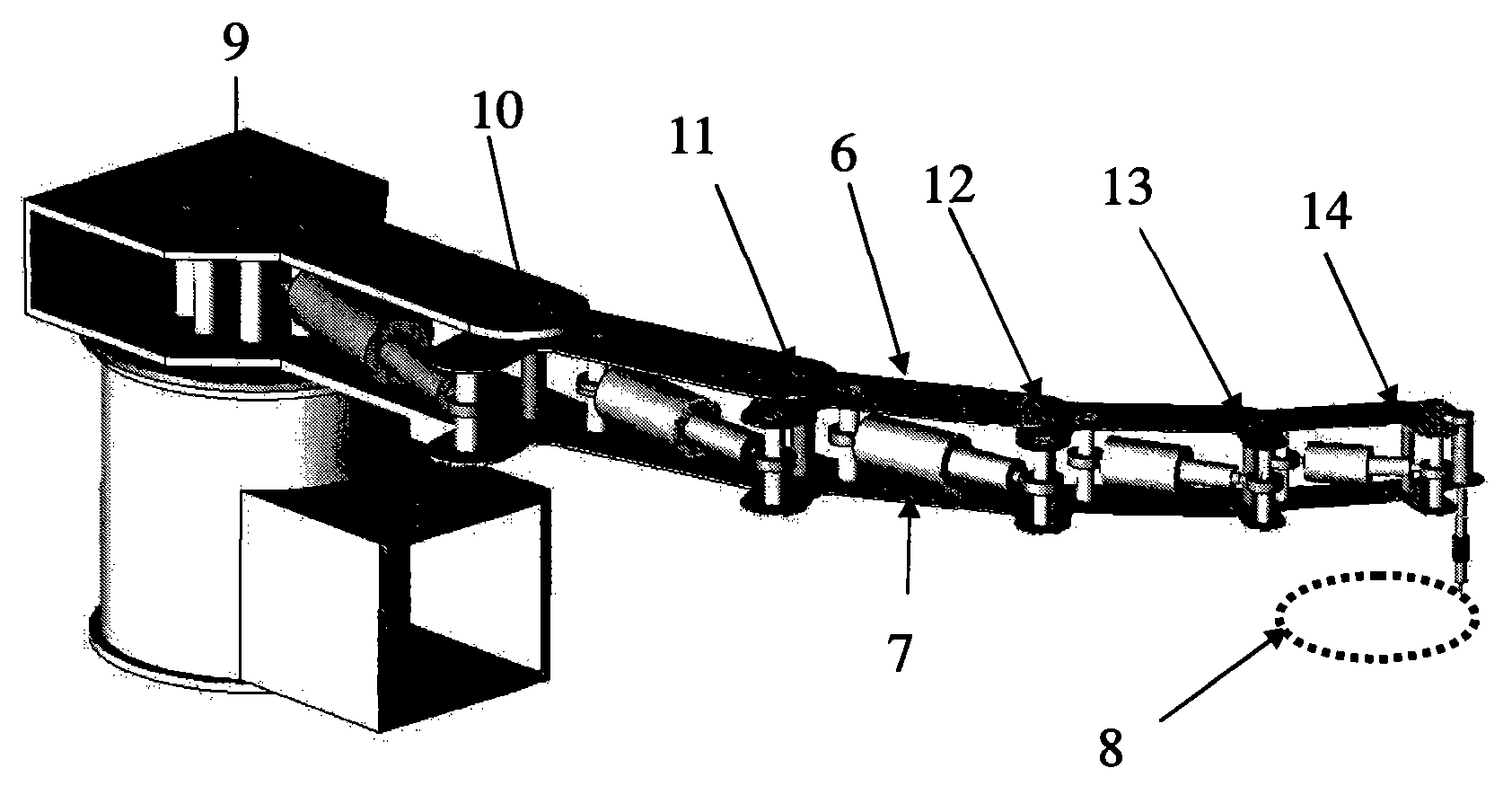
[0021] figure 2 The robot arm shown to implement the present invention is a plane with six degrees of freedom. The mechanical arm is composed of six links, which are composed of joint 9, joint 10, joint 11, joint 12, joint 13 and joint 14.
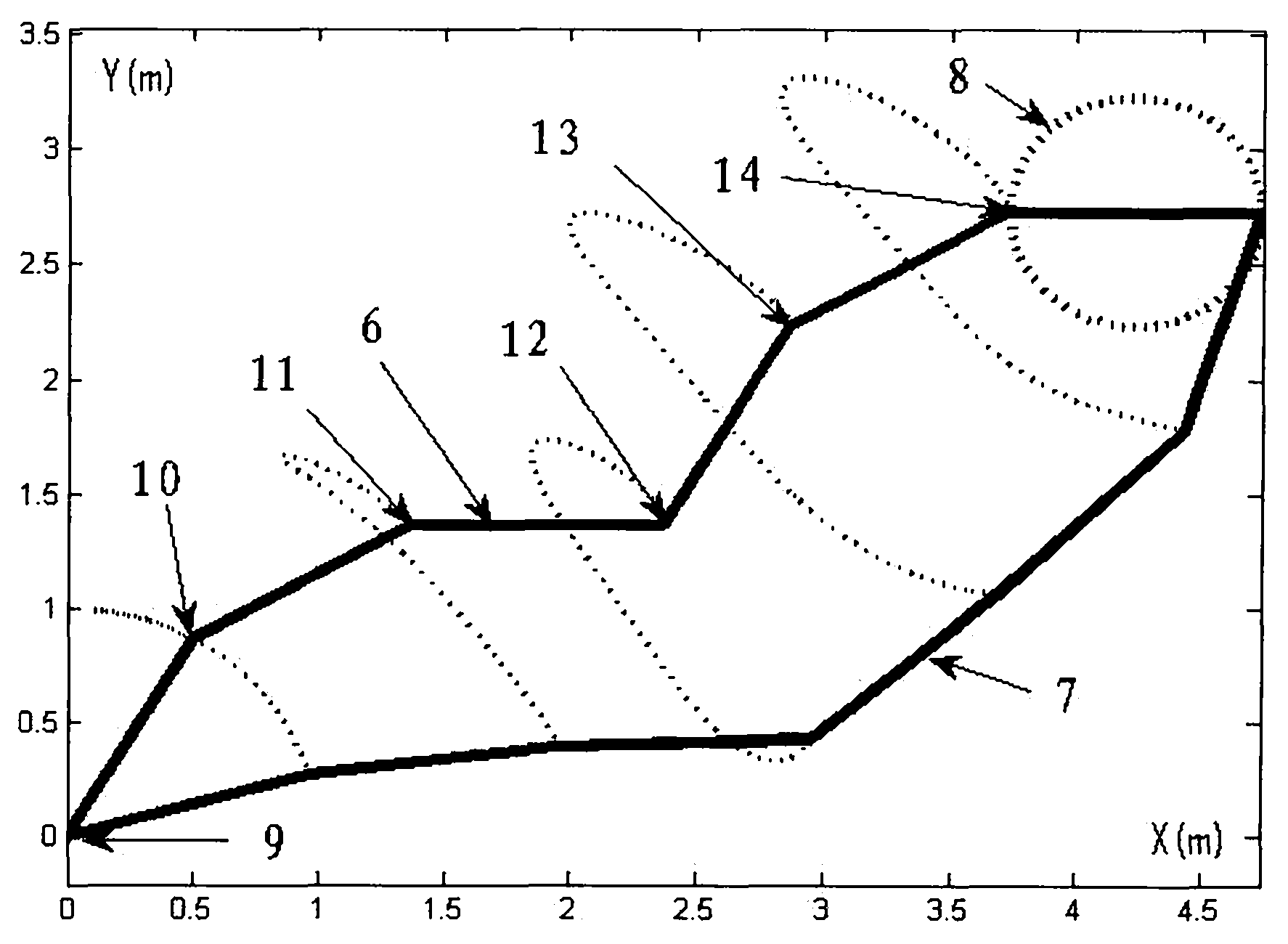
[0022] image 3 The schematic diagram of the non-repetitive motion of the robotic arm shown. Given that the end task 8 is a closed curve, the robotic arm starts to execute from the initial position 6. After completing the task, the robotic arm stops...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More