

Satellite posture all-round controlling method based on magnetic moment device and flywheel
A technology of magnetic torquer and satellite attitude, which is applied in the field of all-round attitude control during the orbiting stage of satellites by using magnetic torquer and flywheel, which can solve problems such as low reliability and short life, and achieve improved safety, reduced power consumption, Effects of Improving Reliability and On-Orbit Lifetime
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
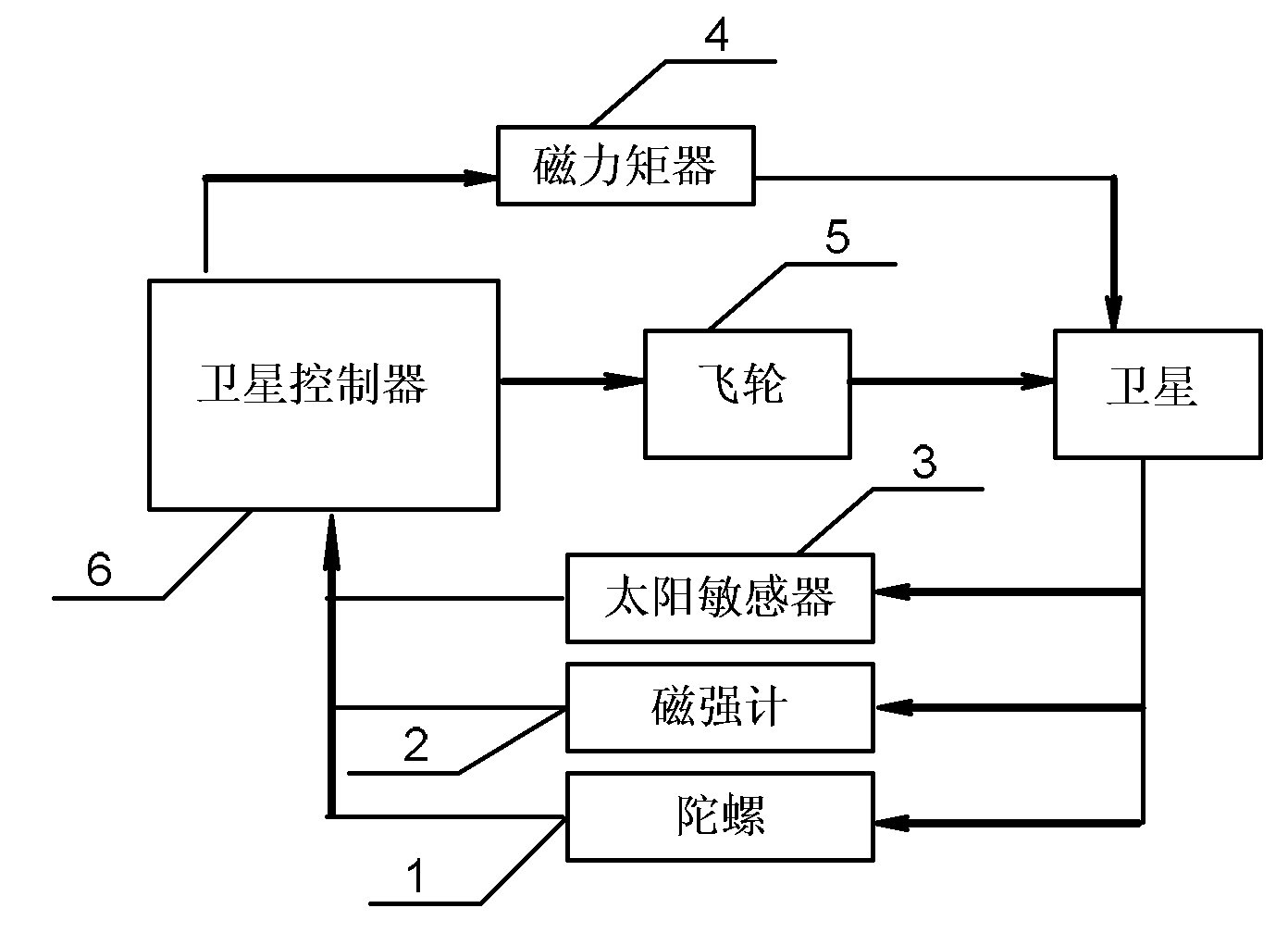
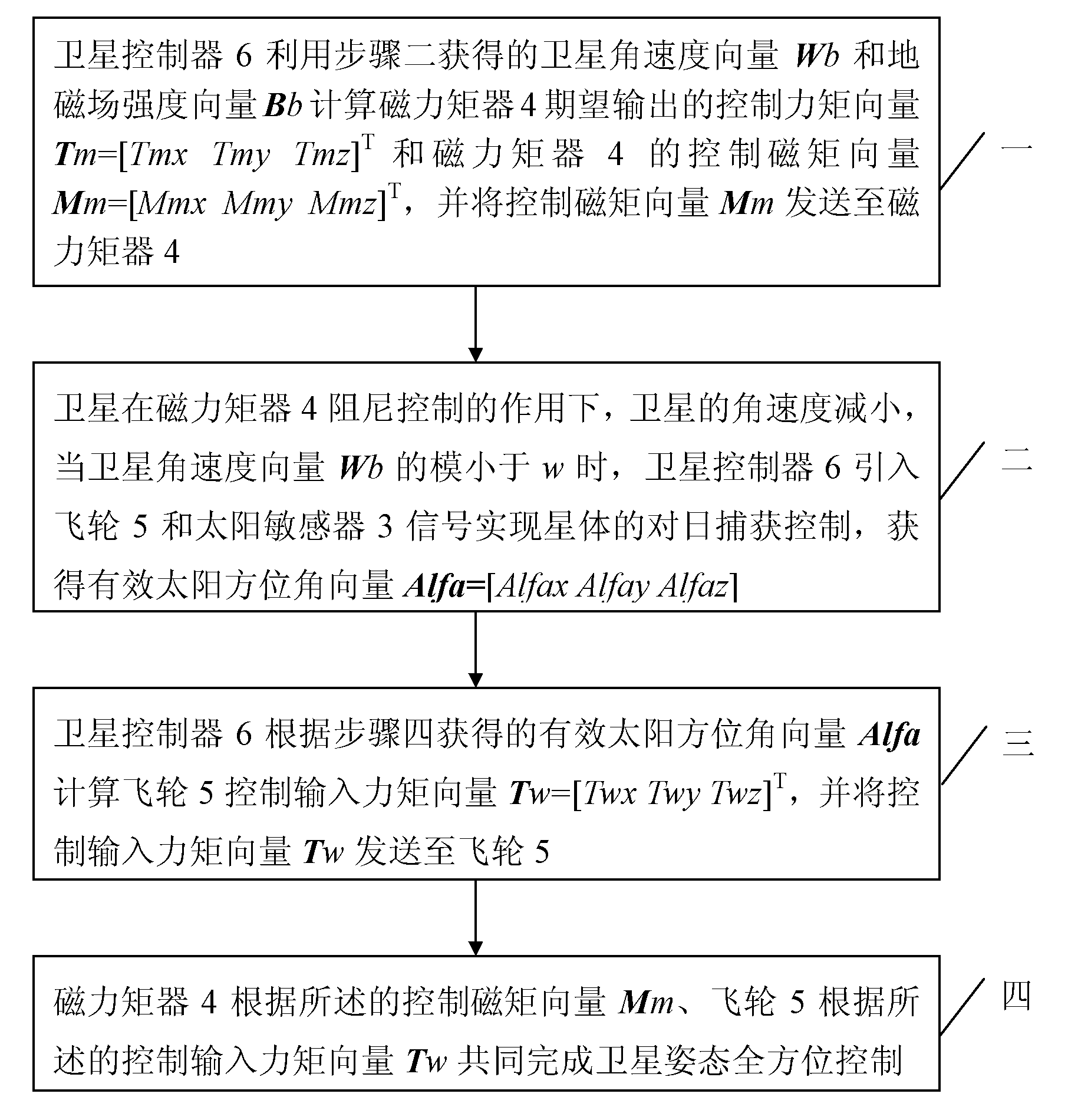
[0014] Specific implementation mode 1. Combination figure 1 , 2 image 3 with Figure 4 Describe this embodiment, the omni-directional satellite attitude control method based on the magnetic torque device and the flywheel, the specific process is as follows:
[0015] Set the controller parameters according to the control system requirements; the controller parameters include satellite controller differential coefficient vector Kd=[Kdx Kdy Kdz] T , Satellite controller proportional coefficient vector Kp=[Kpx Kpy Kpz] T , Vector dead zone uncontrolled angle value Theta and satellite angular velocity limit coefficient Limit60 during attitude capture;
[0016] Close the control command sent to the magnetic torque device 4 at the T-t moment of each control cycle until the end of this cycle, then utilize the magnetometer 2 to measure the vector Bb=[Bbx Bby Bbz] of the local magnetic field strength in the satellite body coordinate system T , utilize the gyroscope 1 to measure th...
specific Embodiment approach 2
[0022] Specific implementation mode 2. This implementation mode is a further description of specific implementation mode 1. According to the requirements of the control system, the specific process of setting the controller parameters is as follows:
[0023] Set satellite controller differential coefficient vector Kd and satellite controller proportional coefficient vector Kp according to control theory:
[0024] Kp=Wc 2 *Ib,
[0025] Kd=2keci*Wc*Ib
[0026] Among them, Wc is the system frequency, keci is the system damping ratio, Ib=[Ibx Iby Ibz] T is the moment of inertia vector of the satellite;
[0027] The limit coefficient Limit60 of the satellite angular velocity when setting the attitude capture is:
[0028] Limit60=2keci*WLimit / Wc
[0029] Among them, Wlimit is the upper limit value of attitude maneuver angular velocity;
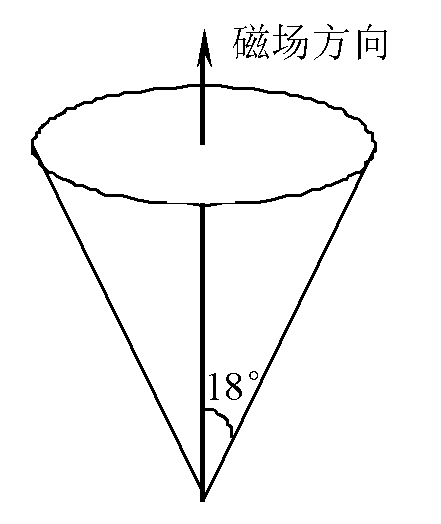
[0030] Assuming that under the damping condition of the magnetic torque device 4, the vector dead zone non-control angle value Theta is set a...
specific Embodiment approach 3
[0031] Specific embodiment three, combine image 3 This embodiment is described. This embodiment is a further description of Embodiment 2, and the vector dead zone non-control angle value Theta is 18°.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More