

Electronic differential system based on relative slip ratio control
A technology of electronic differential speed and slip rate, which is applied in the direction of automatic steering control components, control drives, control devices, etc., can solve the problems of unstable control and increased control calculation amount
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
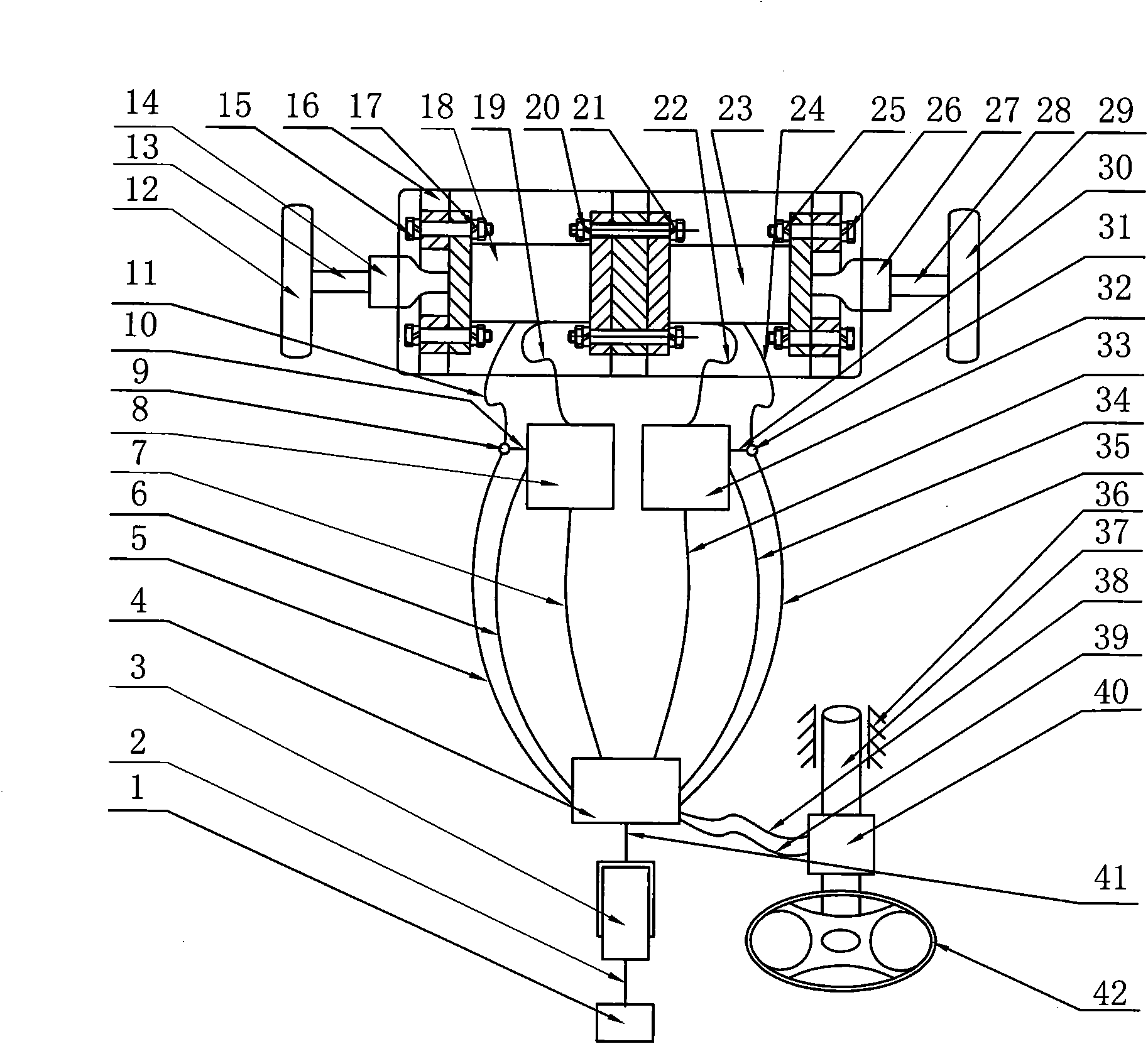
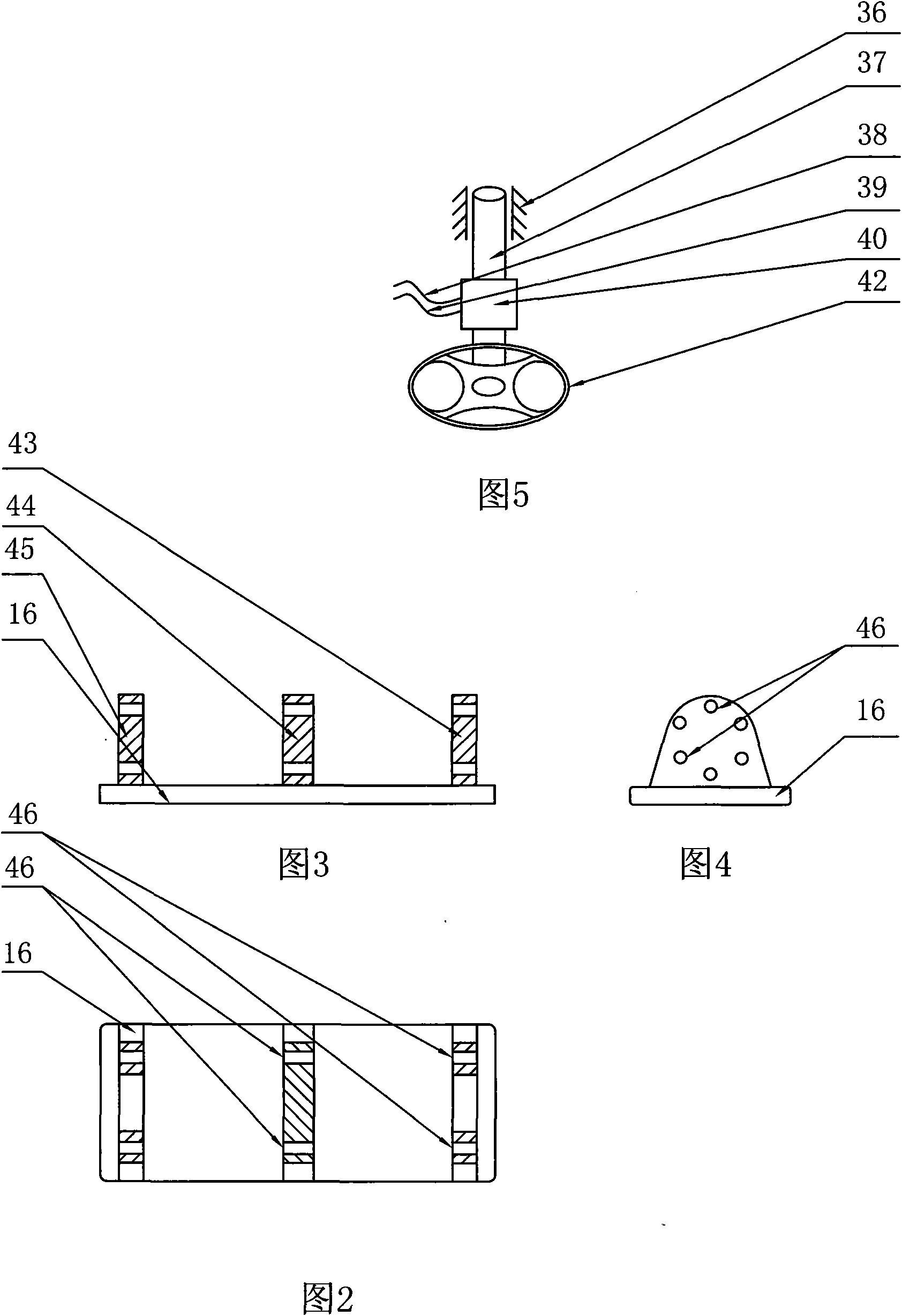
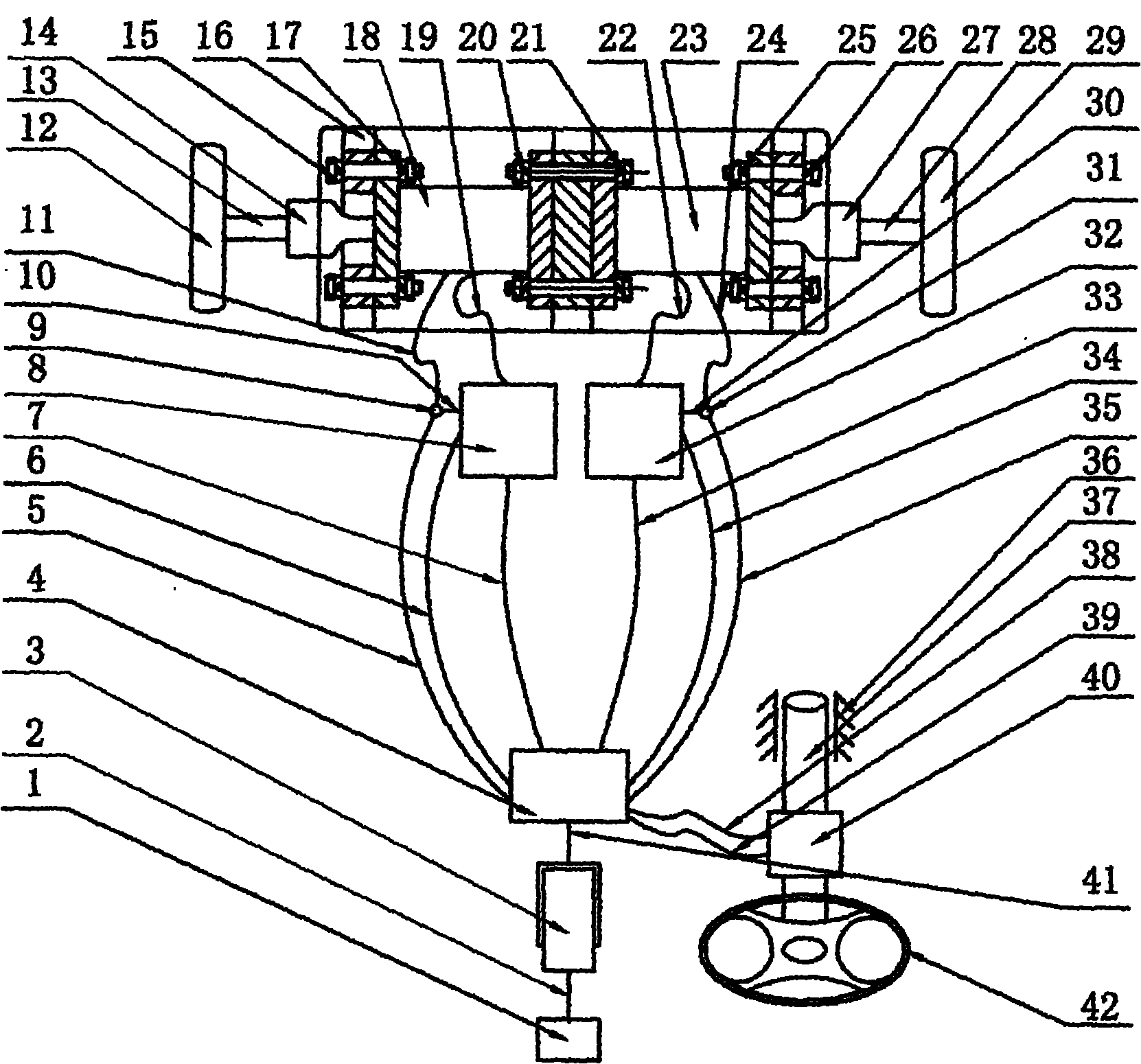
[0028] The electronic differential system based on relative slip rate control of the present invention, as attached figure 1 , 2 , 3, 4, and 5, the accelerator 3 is Hall-type, and the position of the accelerator pedal 1 is converted into a control voltage signal by the accelerator 3 to form an accelerator signal 41. The value of the accelerator signal 41 is 0.9U to 3.5U, and the accelerator signal 41 is connected to the operation processing circuit 4 for operation processing to generate a control signal. The voltage value of the control signal is 0.9U to 3.5U, which is divided into left and right control signals. Controller 8, the right control signal is transmitted to the right controller 32 through the right control signal line 33, so that the left and right controllers generate switching instructions to control the switches of the left and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More