

Target identification method based on image characteristic analysis
An image feature and recognition method technology, applied in image analysis, image data processing, character and pattern recognition, etc., can solve the problems of vector machine inapplicable scene matching, occupying a lot of resources, wrong matching, etc., to reduce storage resources and computing. The effect of time, reducing the number, and good robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
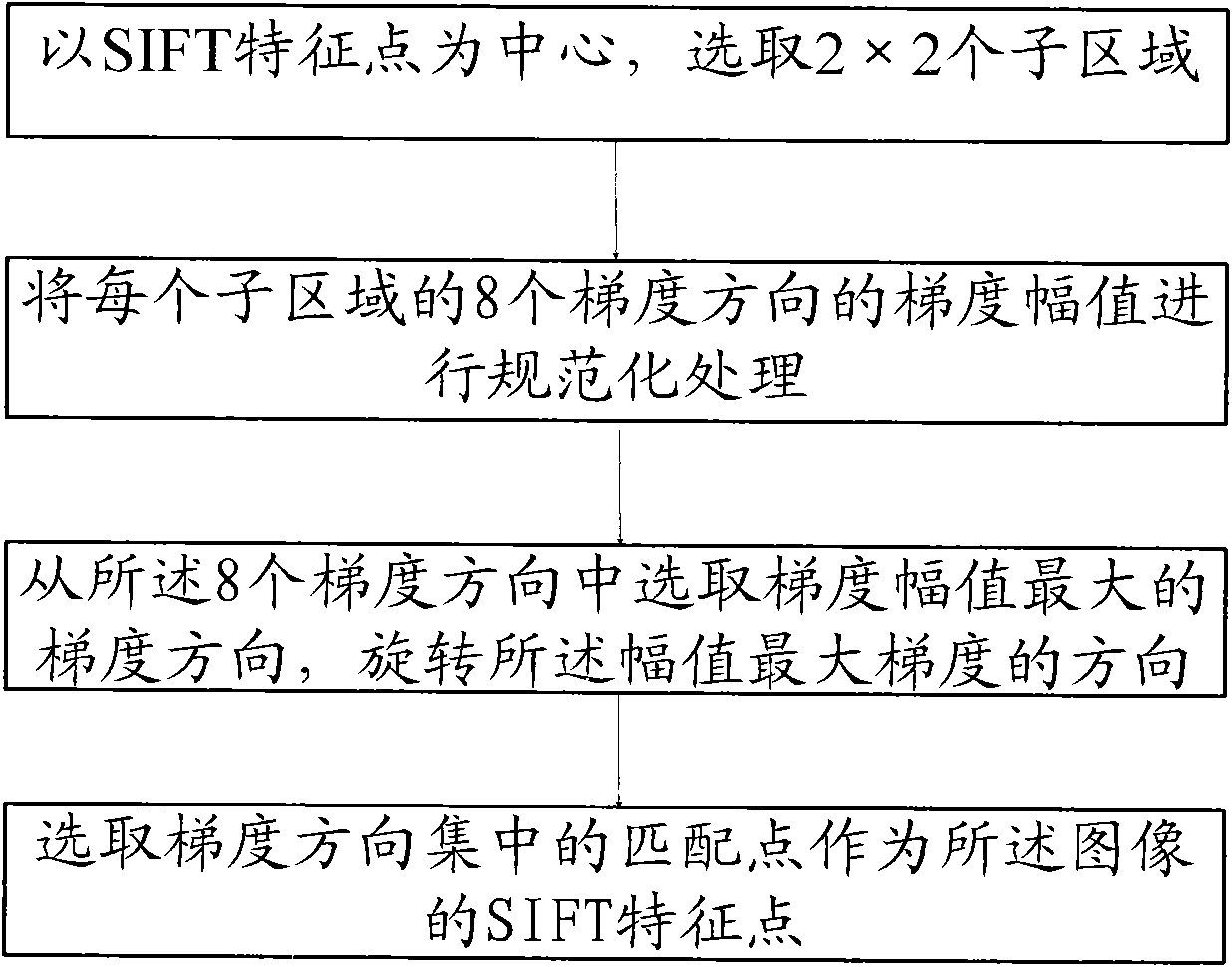
[0019] The object recognition method based on image feature analysis of the present invention mainly includes the following three steps: reducing the dimension of the feature point vector; normalizing the maximum gradient rotation; reducing the number of feature points. The object recognition method based on image feature analysis of the present invention will be further described in detail below in conjunction with the accompanying drawings.
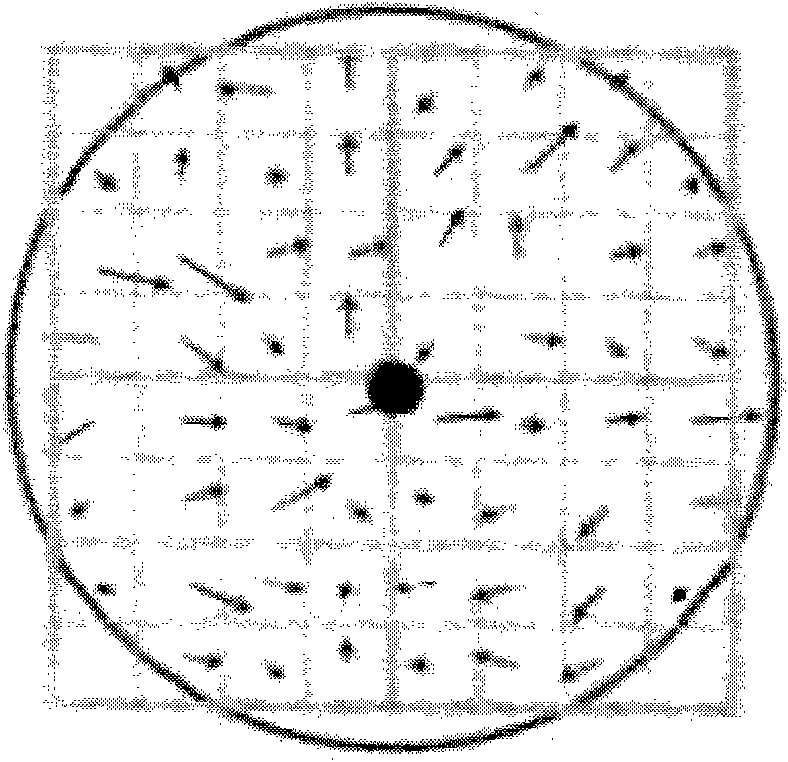
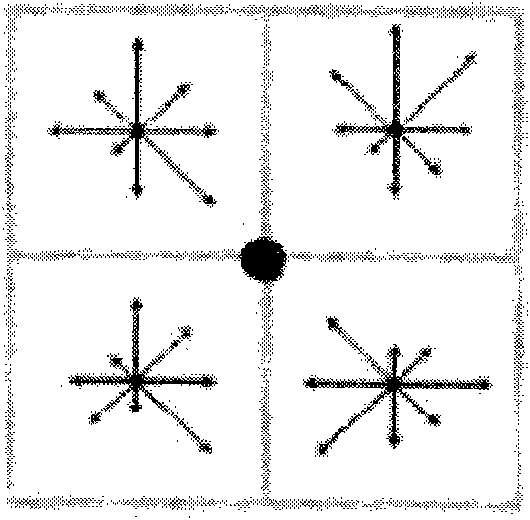
[0020] see figure 1 , figure 1 It is a flow chart of the object recognition method based on image feature analysis of the present invention. First, 2×2 sub-regions are selected with the SIFT feature point as the center. Because the traditional SIFT feature point vector dimension is 128 bits, that is, 4x4x8, the gradient direction of each sub-region consists of 8 directions, and these 8 directions are distributed at intervals of 45 degrees on the Cartesian coordinate system, and such sub-regions are represented by feature points There...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More