

Multi-body magnetic adsorption type adaptive wall climbing robot
A wall-climbing robot and magnetic adsorption technology, which is applied in the direction of manipulators, claw arms, manufacturing tools, etc., can solve the problems of poor movement flexibility and inability to be used for processing operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The specific structure and working principle of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
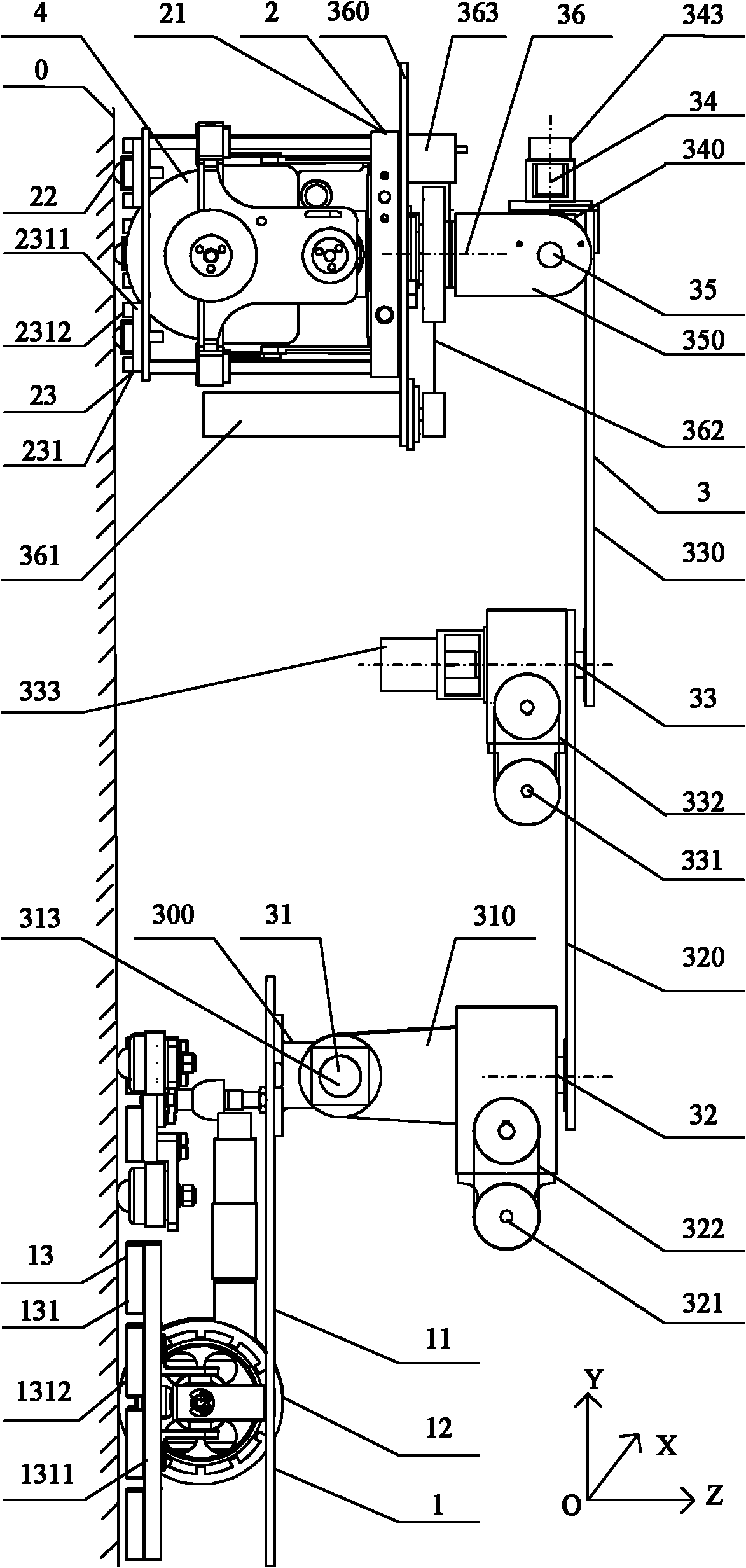
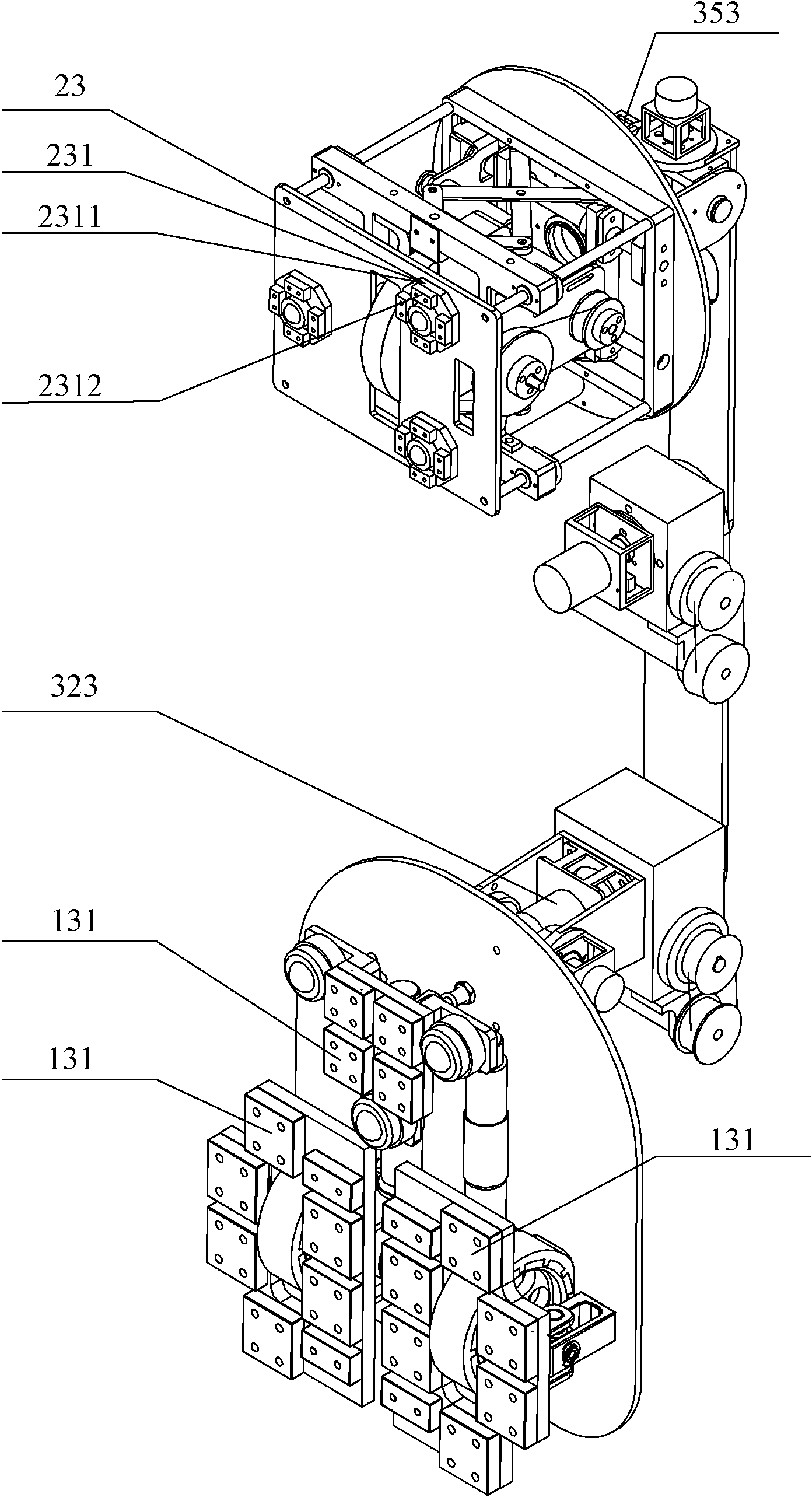
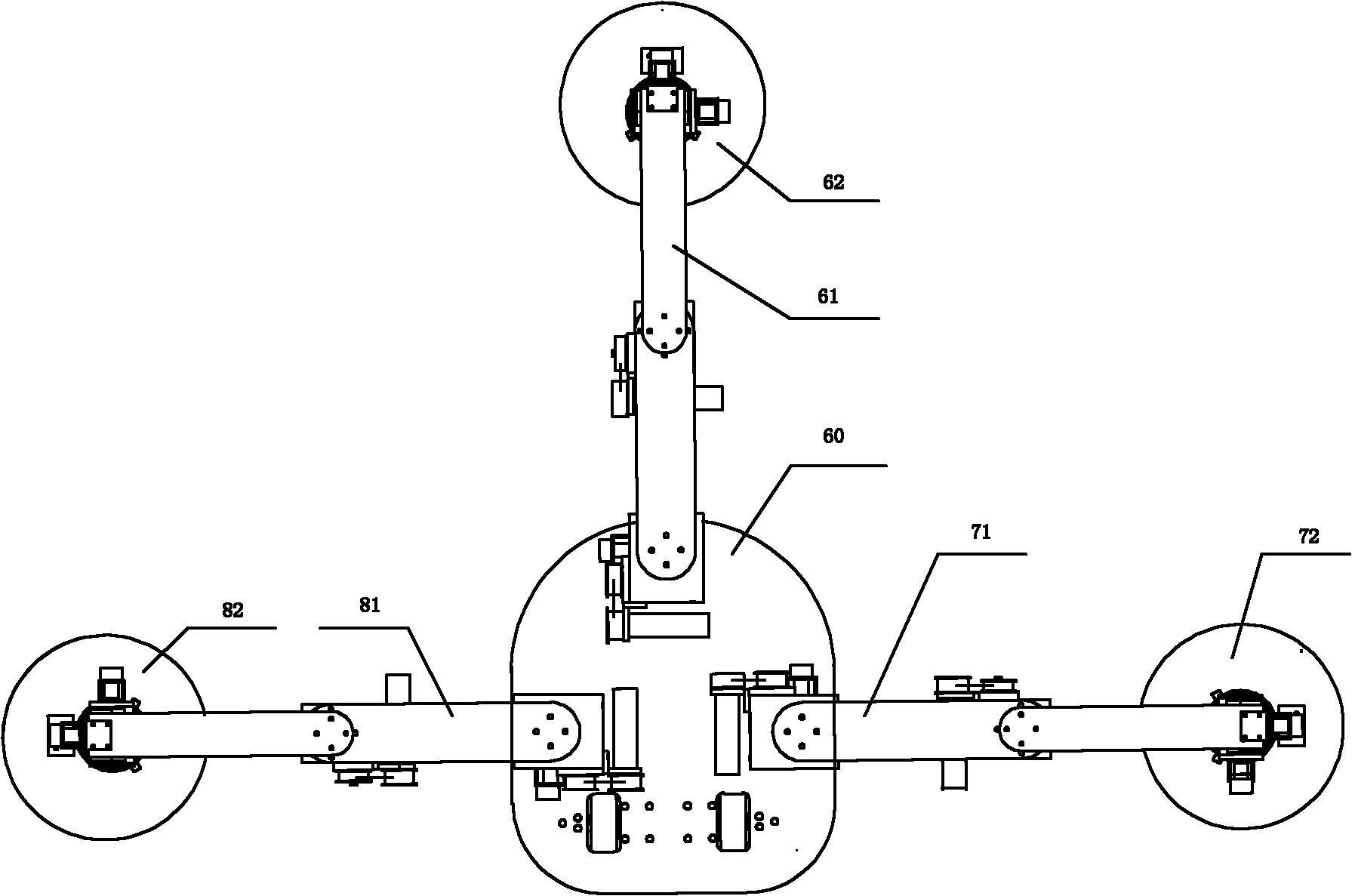
[0052] figure 1 , 2 It is a schematic diagram of the structural principle of the multi-body magnetic adsorption type adaptive wall-climbing robot provided by the present invention, including a main body device 1 and an operation tool 4, and the main body device includes a main body frame 11, a moving mechanism 12 and a main body magnetic adsorption device 13; the moving mechanism is fixed Installed on the main body frame; the main body magnetic adsorption device is in contact with the magnetically permeable wall surface through a moving mechanism; the main body magnetic adsorption device includes at least one main body magnetic adsorption unit 131, and the main body magnetic adsorption unit is fixed or hinged to the main body frame; the main body The magnetic adsorption unit includes a yoke 1311...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More