

Wheel type mobile fruit picking robot and fruit picking method
A technology for picking robots and fruits, applied in the field of agricultural robots, can solve problems such as low picking efficiency and scattered results, and achieve the effects of reducing damage, reducing energy consumption, and reducing damage to fruit branches.
Inactive Publication Date: 2013-05-29
NANJING AGRICULTURAL UNIVERSITY
View PDF2 Cites 5 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
This brings about some important problems. The results of the research are relatively scattered. The picking robot still needs human assistance to perform picking tasks. It can only achieve semi-automation, and the picking efficiency is generally low.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
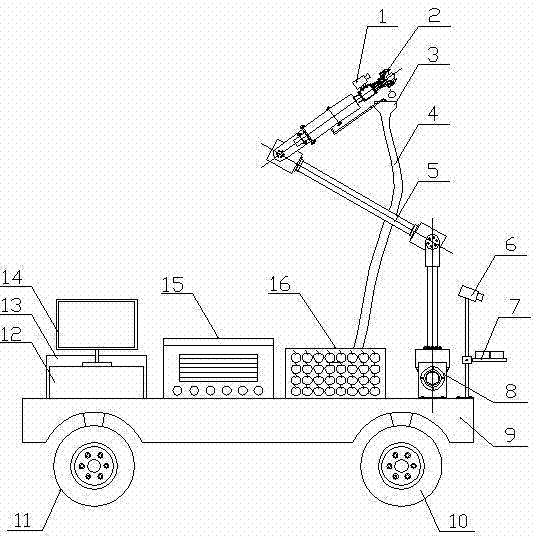
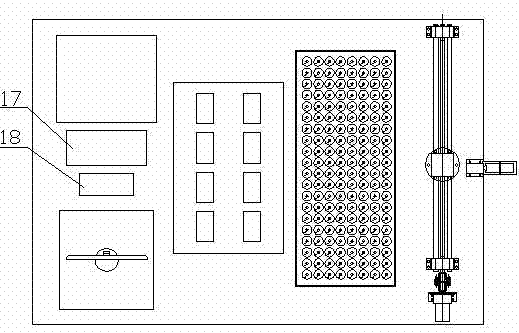
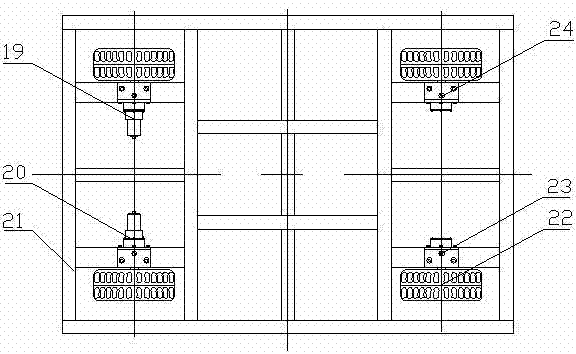
The invention discloses a picking method and picking robot device aiming at fruits which are in size of an apple and is similar to a sphere. The picking robot device comprises a mechanical actuating device, control system hardware and control system software. The mechanical actuating device comprises a picking mechanical arm, an underactuated manipulator, an electric sliding table and an intelligent mobile platform, wherein the control system hardware comprises an IPC (industrial personal computer), a motion control card, a data acquisition card, an AHRS (attitude and heading reference system), a coder, a monocular camera, a binocular camera, a force sensor, a slipping sensor and the like. During operation, the IPC fuses information of the coder, the AHRS, monocular camera components and an ultrasonic sensor to enable the mobile platform to independently navigate and avoid obstacles. A binocular vision system collects images of mature fruits and obstacles and extracts the characteristics of the images so as to realize obstacle avoidance of the mechanical arm and fruit positioning. Finally, the IPC fuses the information of the force sensor, the slipping sensor and the position sensor, thereby further reliably gripping the mature fruits and separating the fruits from fruit branches.
Description
technical field [0001] The invention relates to the technical field of agricultural robots, in particular to a wheeled mobile fruit picking robot and a fruit picking method. Background technique [0002] Fruit is an important economic crop in our country. At present, fruit has become the third largest crop after food and vegetables. The fruit industry plays an important role in the national economy. In the food consumption structure, with the slow decline in the proportion of staple food consumption and the increase in the proportion of non-staple food consumption, the proportion of fruit consumption in the total food consumption is also gradually increasing. Since China implemented the agricultural structure adjustment policy in 1978, China's fruit industry has developed rapidly, and in 1997 it became the world's largest fruit producer. Fruit production increased from 6.57 million tons in 1978 to 50.893 million tons in 1997. By 2006, China's fruit output had reached 95.9...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityPatents(China)
IPC IPC(8): A01D46/00A01D46/22B25J5/00B25J9/08
Inventor顾宝兴姬长英安秋彭磊
OwnerNANJING AGRICULTURAL UNIVERSITY