

Digitalized alternating-current voltage and speed regulation device
A technology of speed regulation device and AC voltage regulation, which is applied to the deceleration device of AC motor, AC motor control, emergency protection circuit device, etc. Easy to debug effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the preferred embodiments of the present invention are given below in conjunction with the accompanying drawings to describe the technical solutions of the present invention in detail.
[0070] 1. Overall Design Scheme
[0071] 1.1 System functions
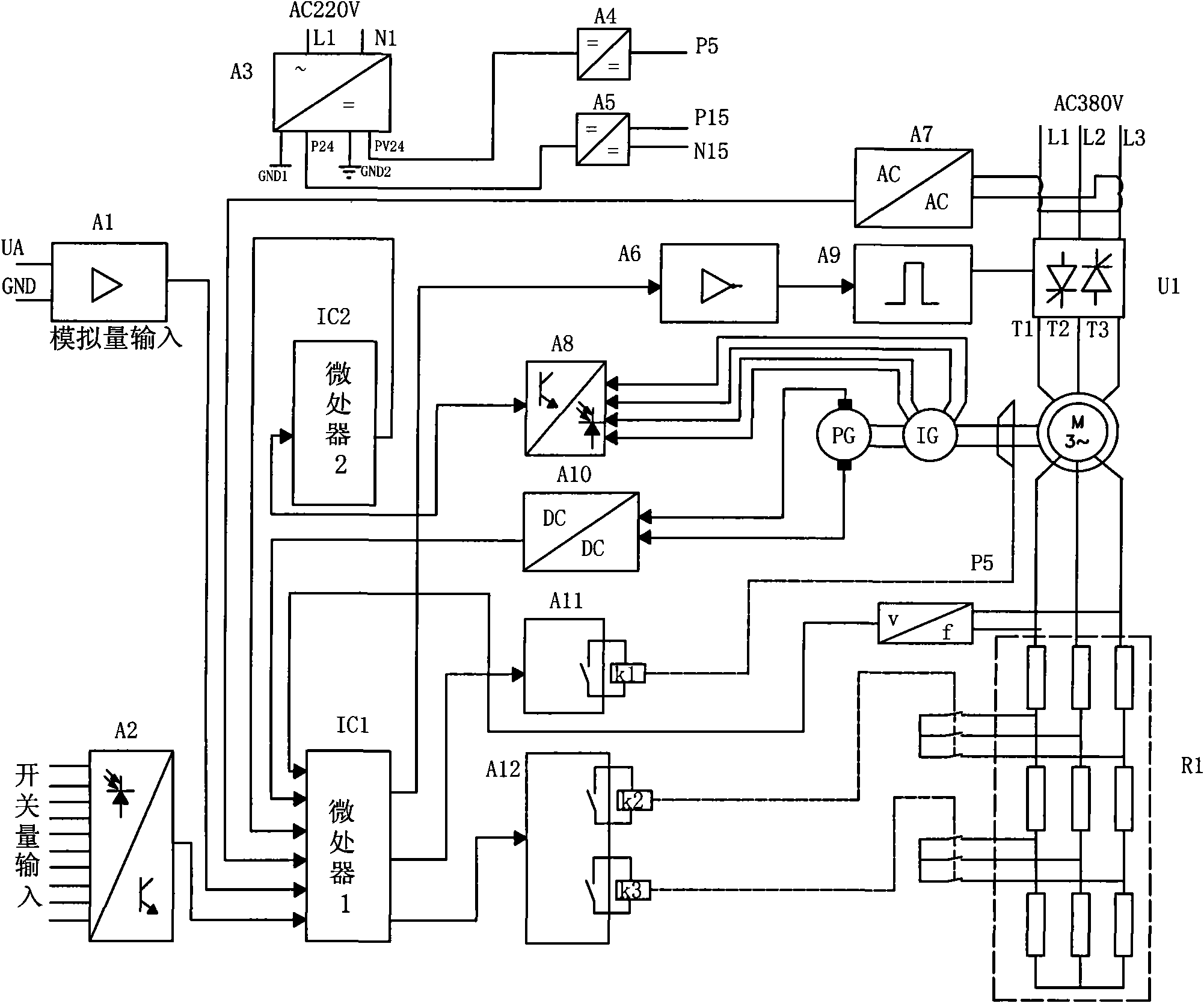
[0072] Based on the requirements of the current market and on-site use environment, an all-digital voltage regulation and speed regulation system is developed on the basis of the original analog voltage regulation and speed regulation system. The basic functions of the system are as follows:
[0073] (1) Digital control can improve the stability of the system and avoid parameter drift caused by amplifier zero drift and potentiometer vibration.
[0074] (2) Easy to debug, you can directly input parameters with a PC through the man-machine interface, or set parameters through the shortcut keys on ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More