

Single instruction multiple data (SIMD)-based k-discrete oriented polytope (k-DOP) bounding volume collision detection method
A collision detection and bounding box technology, applied in the field of computer detection, can solve problems such as poor real-time performance, large amount of calculation, and poor compactness, and achieve the effects of shortening the time of collision detection, increasing the parallel acceleration ratio, and reducing the number of instructions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to describe the present invention more specifically, the collision detection method of the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
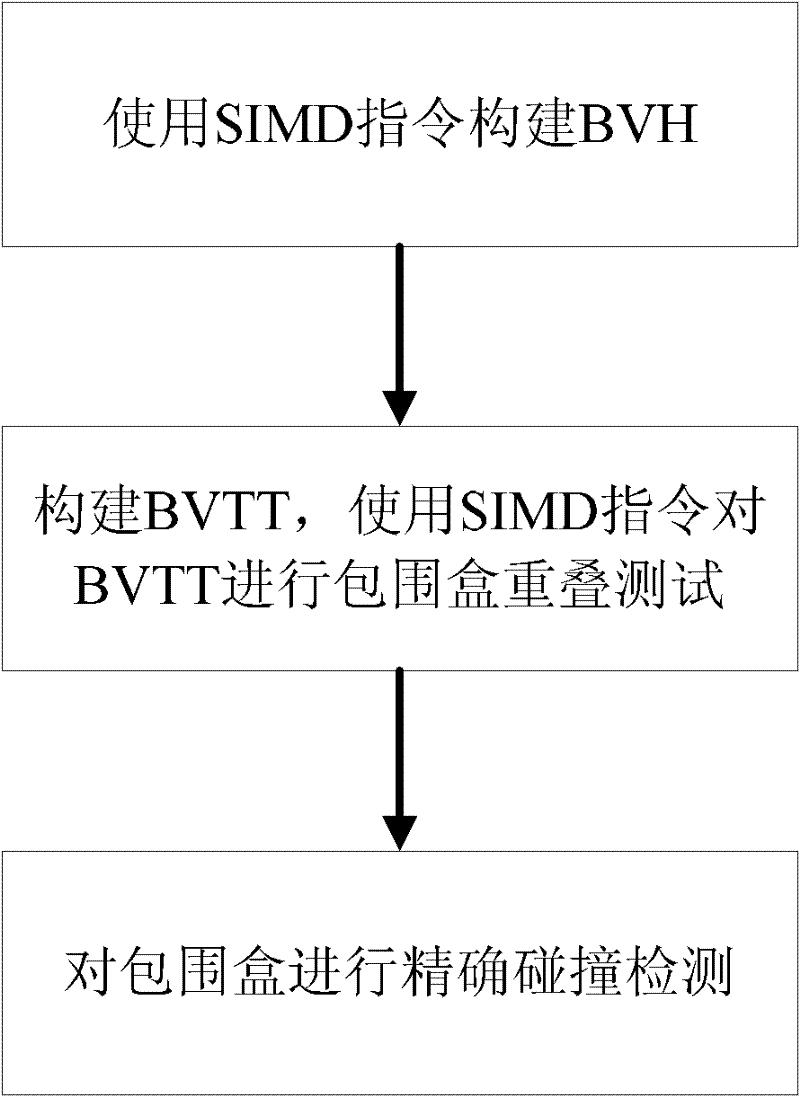
[0019] Such as figure 2 As shown, a SIMD-based 16-DOP bounding box collision detection method includes the following steps:
[0020] (1) Construct BVH using SIMD instructions.
[0021] Use the SIMD instruction to construct the corresponding 16-DOP bounding box for each triangle in the triangle mesh flexible scene model to be detected, and then establish the bounding box hierarchy of the triangle mesh flexible scene model; when the nth collision detection is performed, the bounding box The box hierarchy is based on the spatial position of each triangle at the time of the nth collision detection, using the SIMD instruction to reconstruct the bottom 16-DOP bounding box in the bounding box hierarchy in the last collision detection process, and then u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More