An anthropomorphic hip joint mechanism
A hip joint, anthropomorphic technology, applied in the field of anthropomorphic robots, can solve the problems of poor processing and assembly process, small bearing capacity, complex structure, etc., and achieve the effect of compact structure, strong bearing capacity and motion decoupling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0008] The present invention will be further described below in conjunction with the accompanying drawings.
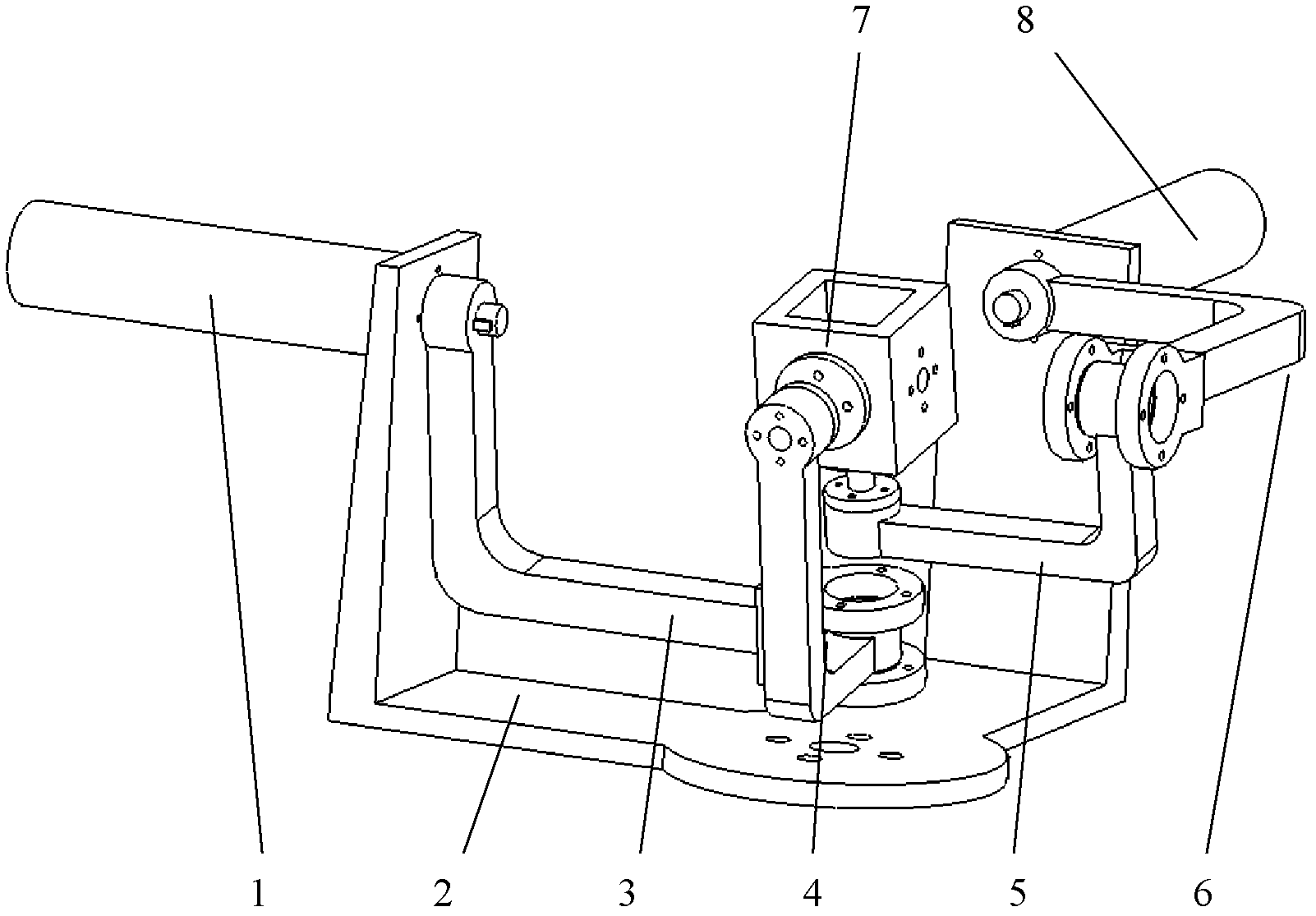
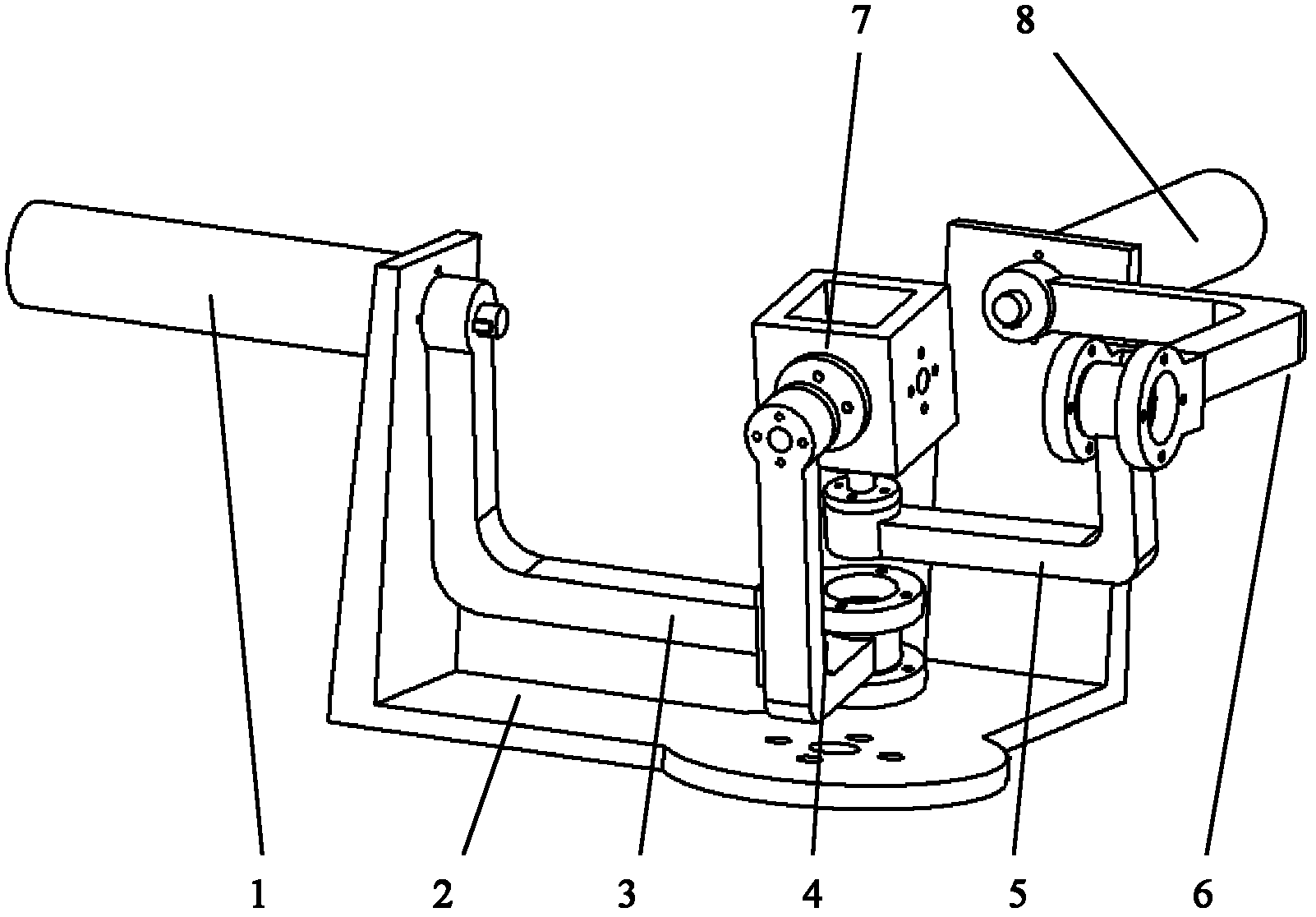
[0009] refer to figure 1 , a humanoid hip joint mechanism, including a first driving motor 1 and a second driving motor 8, a base 2, a first active rod 3 and a second active rod 6, a first connecting rod 4 and a second connecting rod 5 and a moving rod Platform 7, the first drive motor 1 and the second drive motor 8 are installed on the base 2, the rotation shaft of the first drive motor 1 is fixedly connected with one end of the first active rod 3, and the other end of the first active rod 3 Link to each other with one end of the first connecting rod 4 through the rotary joint, and the other end of the first connecting rod 4 links to each other with a connection surface of the moving platform 5 through the rotary joint; One end is fixedly connected, and the other end of the second active rod 6 is connected with one end of the second connecting rod 5 by a rotary joint...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More