

A hybrid elastically driven walking leg of a walking robot
A walking robot and elastic drive technology, applied in the field of bionic robots, can solve the problems of poor shock absorption and buffering effect, small robot load capacity, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] Preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0027] At the present stage, the driving of the walking leg joints generally adopts a power source (such as a motor) directly driven by a transmission mechanism. This way is easy to damage the joints. The present invention uses an elastic driver to indirectly drive the joints to avoid damage to the joints. joint damage.
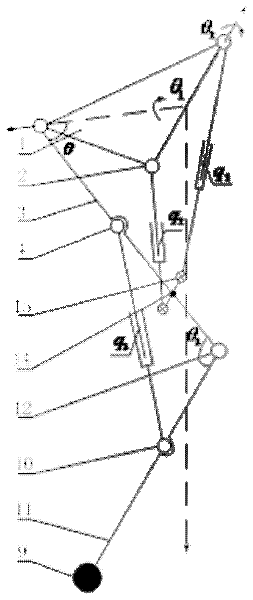
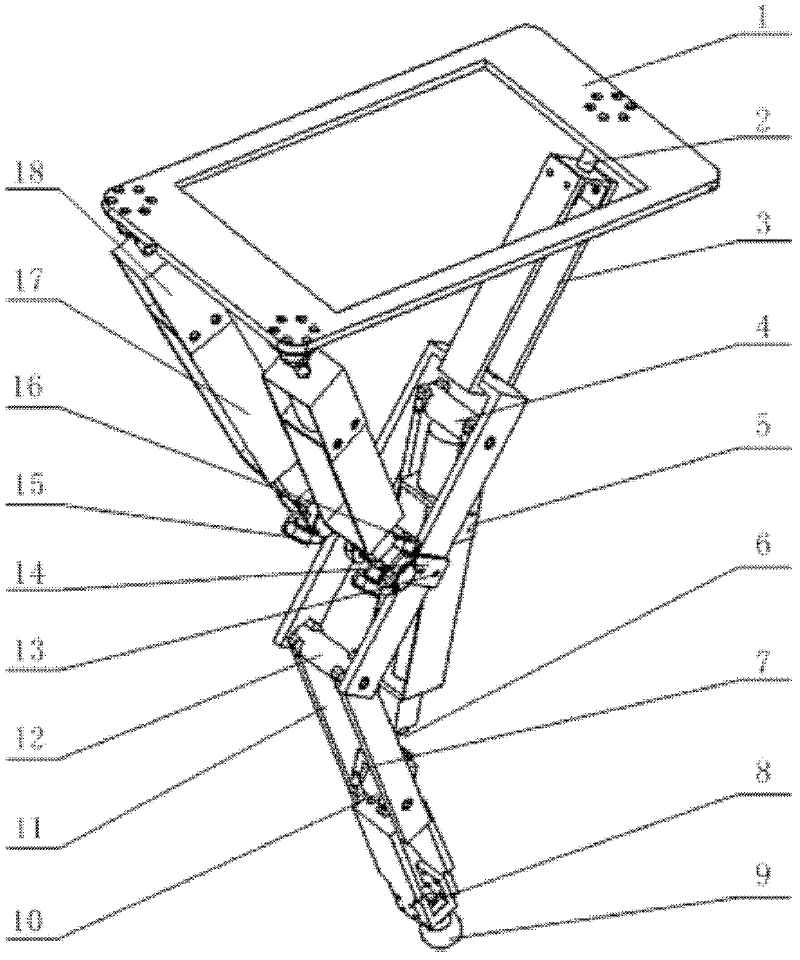
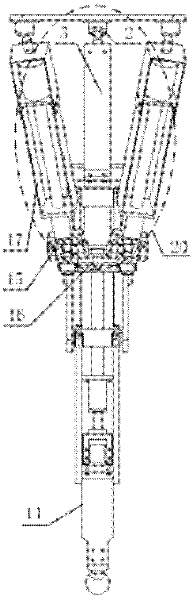
[0028] to combine Figure 1 to Figure 5 , the present embodiment is a hybrid elastically driven walking leg of a walking robot, which is a walking leg whose joint movement of a robot leg is indirectly driven by an elastic driver. Its main components include three ball hinges 2 fixed on the leg base 1, and the three ball hinges form an isosceles triangle 21 (see Figure 5 ) is arranged on the base, a ball hinge 2 is connected with the thigh part 3, and after the middle connecting seat 14 is connected with the thigh part 3 t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More