

Device for pneumatically driving two free flexible mechanical arms and method for controlling device
A flexible mechanical arm and pneumatic drive technology, applied in the field of flexible robots, can solve problems affecting the normal operation of the mechanical arm, low rigidity of the flexible mechanical arm, low-frequency large-scale vibration, etc., and achieve the effect of simple structure, high control precision and fast work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
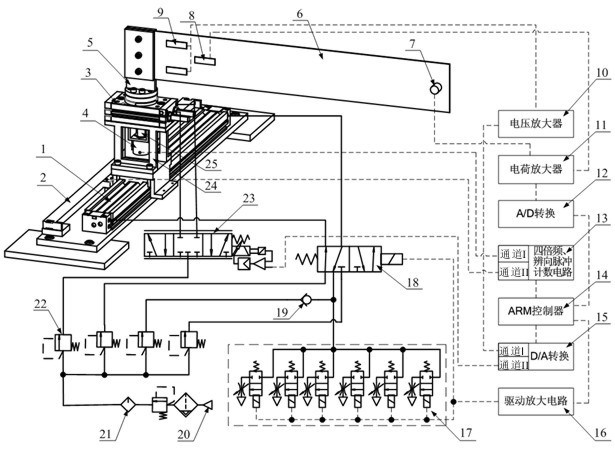
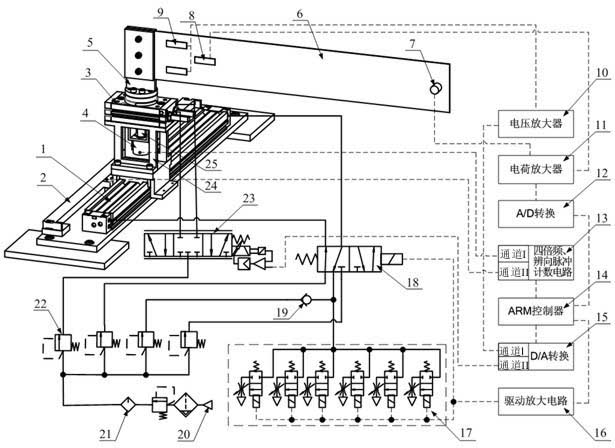
[0042] Such as figure 1As shown, one end of the flexible mechanical arm 6 is connected to the swing flange of the swing cylinder 3 through the swing flange mechanical connection device 5 . The swing flange of the swing cylinder 3 is connected with the rotating shaft of the photoelectric encoder 4 through a shaft coupling 25, and the photoelectric encoder 4 is fixedly connected with the base of the swing cylinder 3, so that the rotation angle of the swing cylinder 3 rotating flange can be detected. A plurality of piezoelectric ceramic sheets are pasted near the mechanical connection device 5 of the flexible mechanical arm 6 and the swing cylinder to rotate the swing flange, respectively as the piezoelectric sheet sensor 8 and the piezoelectric driver 9, and the piezoelectric driver 9 is located on the flexible The upper and lower sides of the transverse midline near the fixed end of the mechanical arm 6 are 2.5 cm away from the fixed end in the length direction, and 2 cm away f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More