Autonomous taking off and landing control method for indoor airship
A technology of control method and control algorithm, which is applied in the direction of height or depth control, can solve the problems of small flying space, weak power, and even personnel in the field, and achieve stable and accurate autonomous take-off and landing, free adjustment and change process, take-off and landing The effect of various ways
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Refer to the attached Figure 1-5 , to further describe the present invention.
[0020] The autonomous take-off and landing control method for the indoor airship can better realize the autonomous take-off and landing of the indoor airship, ensure the smooth, accurate and rapid take-off and landing process, and diversify the take-off and landing methods. To achieve the above object, the present invention includes the following contents:
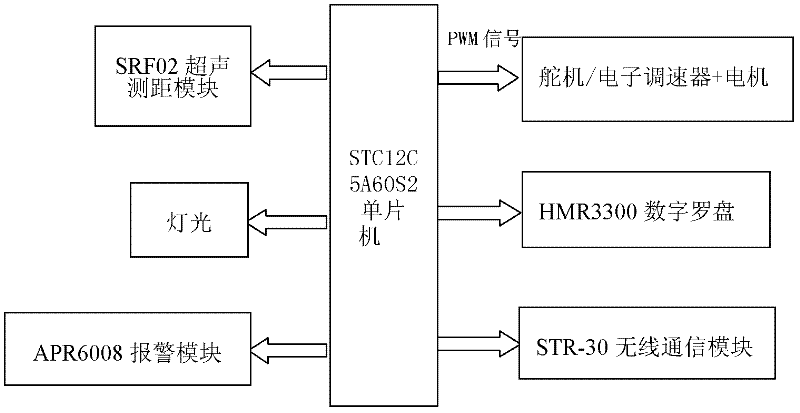
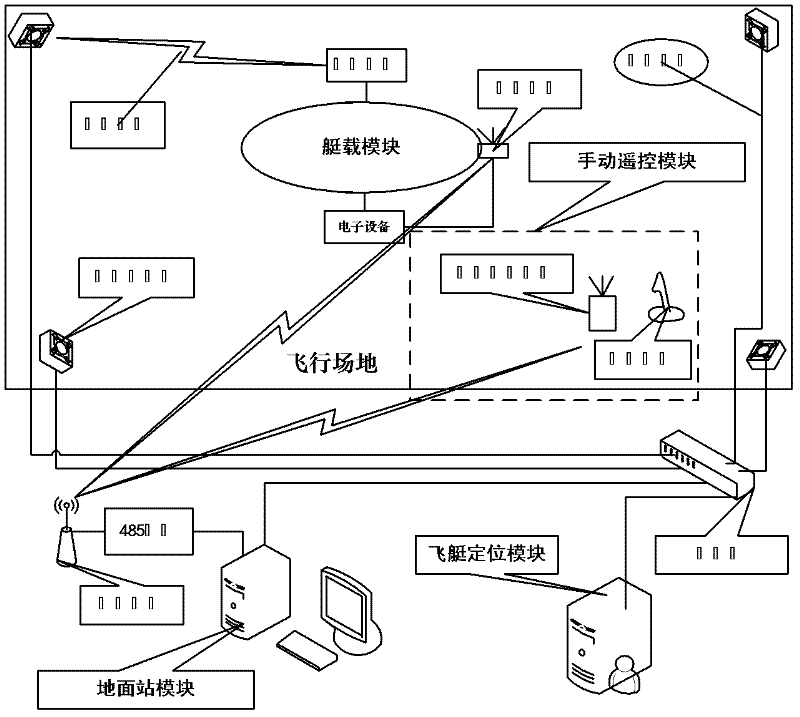
[0021] Indoor airship system (see figure 1 ) with the STC12C5A60S2 single-chip microcomputer as the core and the peripheral electronic digital compass, wireless communication module, steering gear or motor with electronic speed controller, and ultrasonic ranging module to form a link; wireless communication with the ground station and manual remote control through the wireless communication module, Analyze and receive instructions according to the established communication protocol and generate PWM signals to control the motor or stee...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More