CAN (Controller Area Network) and LIN (Local Interconnect Network) bus network based vehicle control system
A technology of CAN bus and automobile control, applied in the direction of comprehensive factory control, comprehensive factory control, electrical program control, etc., can solve the problems of poor expandability, etc., and achieve enhanced expandability, coordinated and orderly network work, and improved timeliness Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] Taking an SUV model developed by the applicant as an example,
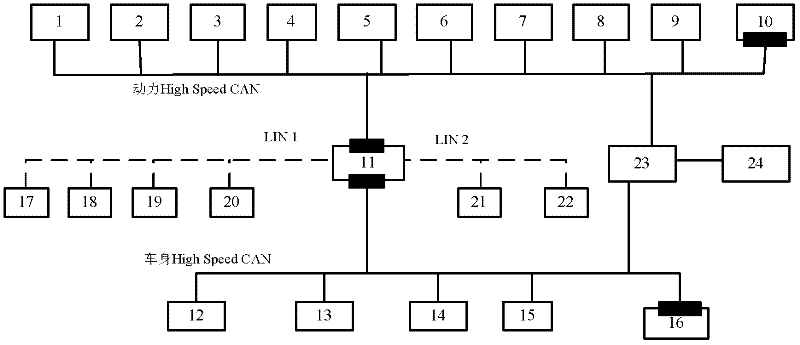
[0027] (1) Vehicle network topology diagram
[0028] figure 1 Shown is the vehicle network topology. The vehicle's electronic configuration is complex, with a large number of electronic control units and a large number of messages. According to the previous development experience, the load rate of one high-speed CAN bus is less than 30%. Through node simulation, the current load rate has exceeded 30%. For the stability of the network, two high-speed CANs (power high-speed CAN hereinafter referred to as power High Speed CAN1 and body high-speed CAN hereinafter referred to as body HighSpeed CAN2) are used. Among them: the load rate of power High Speed CAN1 is 26.8%, and the load rate of body High Speed CAN2 is 5.7%. For the LIN nodes with low communication rate and low real-time performance on the body, two LINs (the first LIN and the first LIN) are designed. The second LIN is called LIN1 and LIN2 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



