

Sampling control method for relative motion of spacecrafts
A technology of relative motion and control method, applied in three-dimensional position/track control and other directions, which can solve problems affecting the accuracy and safety of spacecraft orbits
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
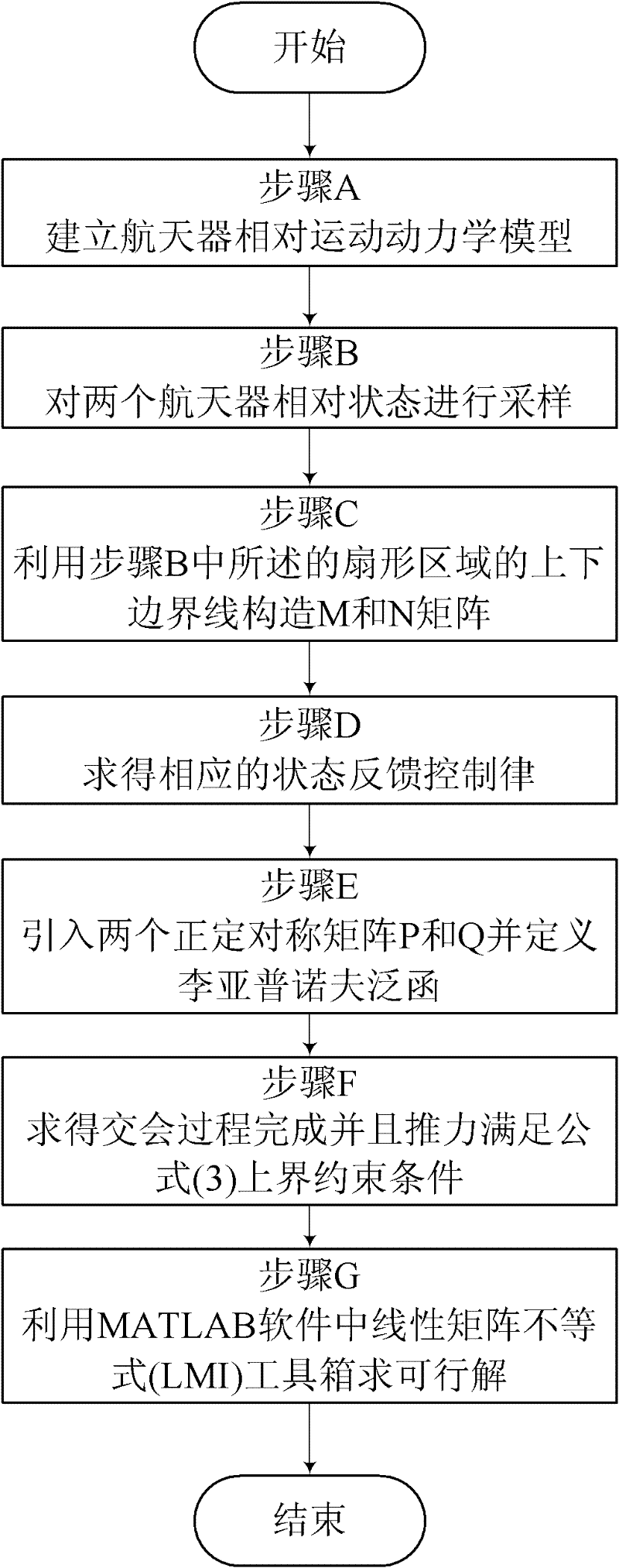
[0085] Specific embodiment one: the sampling control method of the relative movement of the spacecraft in this embodiment is realized by the following steps:
[0086] Step A, establish the relative motion dynamics model of the spacecraft:
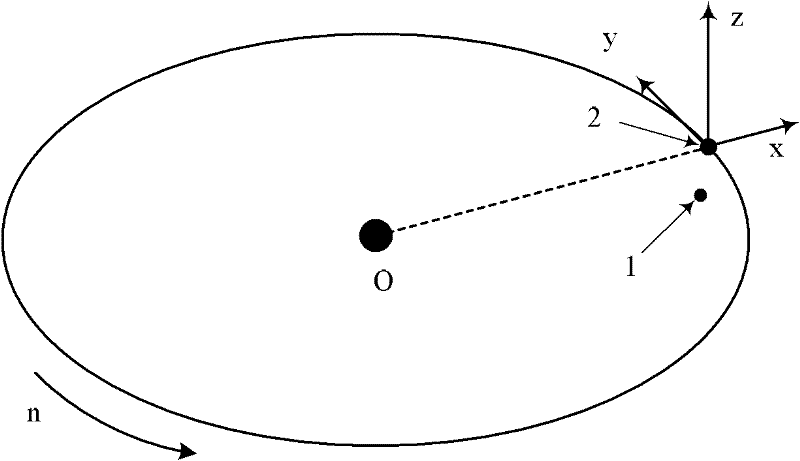
[0087] Assuming that two spacecraft are the tracking spacecraft and the target spacecraft, the target orbit is an approximate circular orbit, and the relative motion coordinate system is established with the target spacecraft as the origin (such as figure 2 shown)
[0088] Take the center of mass of the target spacecraft as the origin o of the coordinate system, the ox axis is located in the orbital plane of the target spacecraft, and the forward direction is the direction of the center of the earth pointing to the spacecraft; the y axis is the running direction of the target spacecraft; the oz axis is perpendicular to the orbital plane and aligned with other The two axes form a right-handed Cartesian coordinate system;
[0089] Let the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More